Из формулы (6.1) необходимо выделить выходной сигнал y:
 (6.2)
(6.2)
В соответствии с методом последовательного интегрирования, уравнению (6.2) соответствует систему ДУ 1-го порядка вида:
![]()
 (6.3)
(6.3)
6.1 Текст программы
6.2 Вывод результата
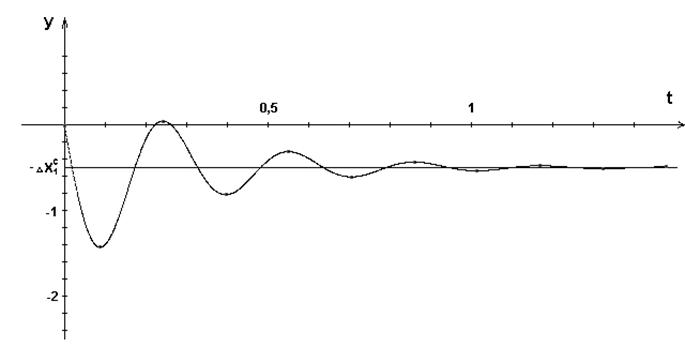
После запуска программы, на экране появится график, представленный на рисунке 6.1.
|
Рисунок 6.1 Кривая переходного процесса в системе
7 ПОКАЗАТЕЛИ КАЧЕСТВА ПЕРЕХОДНОГО ПРОЦЕССА
1) Время регулирования tр = 1,48 с.
2) Величина перерегулирования
![]()
3) Вид переходного процесса – колебательный
4) Период собственных колебаний в системе Tk = 0,3 с
5) Частота колебаний fk = 3,33 Гц
6) Количество колебаний 5
ЗАКЛЮЧЕНИЕ.
После построения и преобразования структурной схемы системы, был произведен анализ устойчивости исходной системы, который показал, что система является неустойчивой. Статический расчет позволил найти коэффициент для корректирующего блока, благодаря которому обеспечивается заданная точность стабилизации выходной координаты системы. Для коррекции динамических свойств системы были найдены параметры корректирующего блока системы, после чего снова был проведен анализ устойчивости системы для верификации корректности работы системы. Анализ скорректированной системы показал, что скорректированная система устойчива.
На основе передаточной функции по возмущающему воздействию составлена система дифференциальных уравнений процессов в системе. Разработанная программа решения системы дифференциальных уравнений позволила наглядно изобразить кривую переходного процесса и определить ее качественные показатели.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.