![]()
![]()
![]()
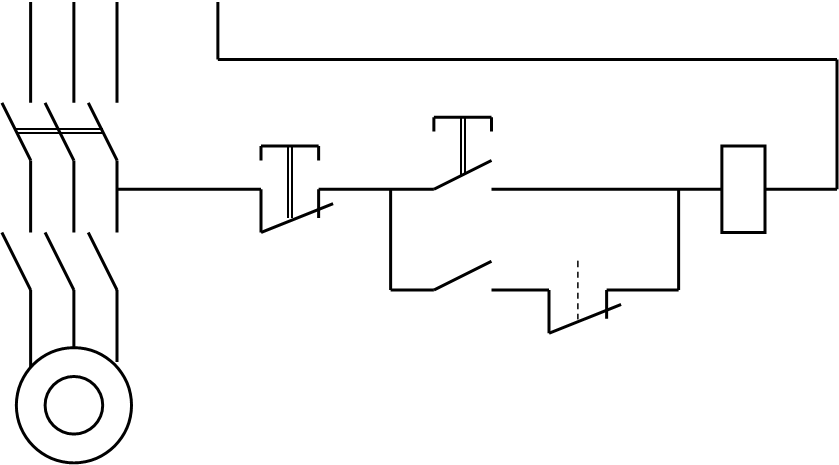
Рисунок 7.7 – Схема управления электроприводом по
циклу: ход
«вперёд» на время ∆t1, реверс, ход «назад» на время
∆t2, реверс и так далее (повторение цикла)
Контакт КТ1.2 подаёт напряжение питания на электромагниты управления контактора КМ2 и реле времени КТ2. Двигатель включается на ход «назад». Контакт КТ2.1 обеспечивает самопитание КМ1 и КТ2. После истечения времени уставки контакт КТ2.3 отключает электромагнит управления контактора КМ2, а контакт КТ2.2 подаёт напряжение питания на электромагниты управления контактора КМ1 и реле времени КТ1. Цикл работы повторяется. Цепь сигнализации состоит из понижающего трансформатора напряжения TV, контактов КМ1.2, КМ2.2 и двух ламп накаливания HL1 и HL2.
Если в рассмотренной схеме управления исключить контакт КТ2.2, действующий с выдержкой времени при замыкании, то схема обеспечит работу двигателя только в течение одного цикла: ход «вперёд», на время Δt1, реверс, ход «назад» на время Δt2, автоматический останов.
Кроме схем управления, которые показаны на рисунках 7.5, 7.6 и 7.7, управление двигателей в функции времени достаточно часто применяется при ступенчатом пуске и торможении асинхронных трёхфазных двигателей с фазным ротором и ступенчатом пуске и торможении двигателей постоянного тока. Данные схемы будут рассмотрены ниже в данном разделе.
7.1.3 Схемы дистанционного управления
электроприводами в функции пути
Схема управления (рисунок 7.8) обеспечивает возможность автоматического отключения электродвигателя от сети при достижении производственного механизма или агрегата крайнего положения траектории движения. Данная функция обеспечивается наличием в цепи самопитания электромагнита контактора КМ1, размыкающего контакта конечного (или путевого) выключателя SQ1. Особенность данной схемы управления заключается в том, что после останова двигателя посредством конечного выключателя SQ1 имеется возможность повторного включения двигателя кнопкой SB2 в толчковом режиме (т.е. двигатель включён, пока удерживается кнопка пуск). Таким образом, данная схема обеспечивает путевую защиту привода.
Для того, чтобы не было возможности повторного включения привода кнопкой SB2, необходимо расположить контакт конечного выключателя SQ1 в цепи электромагнита контактора КМ1 таким образом, чтобы через него осуществлялась подача напряжения на электромагнит управления контактора КМ1 как при нажатии кнопки SB2, так и при питании через блок-контакт КМ1.1. Например, по такой схеме включен размыкающий контакт SQ1.1 конечного выключателя в цепь электромагнита управления контактора КМ1 на схеме, показанной на рисунке 7.10.
Так как производственные машины и агрегаты представляют устройства повышенной опасности для человека, то иногда требуется обеспечить невозможность включения производственного механизма, если не выполнены некоторые действия. Например, требуется обеспечить невозможность несанкционированного включения механизма посторонним человеком, или если не установлены на положенных местах защитные кожухи, люки, двери, а также, если в опасной зоне находятся различные части тела человека (руки, ноги) или наладочный инструмент.
 А В С N QF1
SB2 KM1
SB1 KM1.1 SQ1
KM1 М1
А В С N QF1
SB2 KM1
SB1 KM1.1 SQ1
KM1 М1
Рисунок
7.8 – Схема управления электроприводом с возможностью
останова механизма в крайнем положении
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.