Рассмотрим устройство и принцип действия простейшего кулачкового механизма (рис. 7.3) при вращении кулачка 4 с угловой скоростью ω толкатель 3 совершает определенное возвратно-поступательное движение относительно стойки 2. Постоянный контакт толкателя с кулачком обеспечивается пружиной 1. Это трехзвенный механизм с двумя низшими (кулачок-стойка, толкатель-стойка) и одной высшей (кулачок-толкатель) кинематическими парами. Степень свободы механизма по формуле Чебышева
![]() .
.
Кулачковые механизмы дают возможность
легко воспроизвести требуемую функцию ![]() положения
выходного звена, если придать кулачку соответствующий профиль (φ – угол
поворота кулачка).
положения
выходного звена, если придать кулачку соответствующий профиль (φ – угол
поворота кулачка).
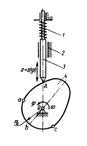
Рисунок 7.3 – Схема кулачкового механизма
Например, толкатель 3
(рис. 7.3) может двигаться с периодическими остановками при непрерывном
вращении кулачка 4. Для этого часть профиля abc выполняют в виде дуги окружности с
центром в точке О. Когда острие A соприкасается с дугой abc, толкатель остановиться, так как в
этом случае радиус-вектор ![]() . Благодаря подобным качествам
кулачковые механизмы получили широкое применение в приборах и особенно
машинах-автоматах для привода рабочих органов, а также программного управления.
. Благодаря подобным качествам
кулачковые механизмы получили широкое применение в приборах и особенно
машинах-автоматах для привода рабочих органов, а также программного управления.
Рассмотрим кулачковый грейферный механизм (рис. 7.4), предназначенный для быстрого перемещения перфорированной ленты на шаг с последующим относительно долгим выстоем. Кулачок 1 образует кинематическую пару с рамкой 2, которая составляет часть толкателя 3. При вращении кулачка толкатель перемещается по стрелкам А; направляющими служат винты 4. Зуб 6 грейфера закреплен на упругой планке 5 толкателя; при рабочем движении зуб входит в перфорации ленты 7 и быстро перемещает ее вниз на шаг. При движении вверх зуб 6 за счет скоса выходит из зацепления с лентой и скользит по межперфорационной перемычке. В это время лента не движется. В крайнем верхнем положении толкателя зуб 6 входит в зацепление с лентой и процесс повторяется.
Кулачковые механизмы делятся на плоские, звенья которых движутся в параллельных плоскостях, и пространственные.

Рисунок 7.4 - Схема кулачкового грейферного механизма
Плоские кулачковые механизмы. Рассматривая схемы (рис. 7.5, а‑д) наиболее широко применяемых плоских кулачковых механизмов, нетрудно заметить, что движение кулачка 4 и толкателя 3 или коромысла 5 может быть возвратно-поступательным, вращательным или сложным (на схемах вид возможного движения звеньев показан стрелками).
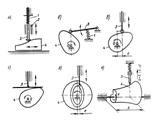
Рисунок 7.5 - Виды кулачковых механизмов
Для нормального действия кулачковых механизмов необходим постоянный контакт кулачка с ведомым звеном. Такой контакт достигается в результате их силового или геометрического замыкания. Силовое замыкание в большинстве случаев обеспечивается пружиной 1 (рис. 7.5, а, б), а геометрическое (рис. 7.5, д) – с помощью паза в кулачке, который направляет движение ролика толкателя. В кулачковом механизме с рамкой 2 (см. рис. 7.4) замыкание также геометрическое.
Звенья кулачкового механизма (кулачок и толкатель) при движении скользят одно по другому, что вызывает их износ. При этом наибольшему износу подвержен остроконечный толкатель (см. рис. 7.3). В целях уменьшения износа часто в качестве промежуточного звена вводят ролик (рис. 7.5, б, в, д), который перекатывается по кулачку. Однако при большой угловой скорости кулачка ролик может перекатываться со скольжением. Поэтому в некоторых случаях целесообразно оформить толкатель в виде «грибка» (рис. 7.5, а) или придать ему вид плоской тарелки 3 (рис. 7.5, г).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.