Кулачковые механизмы, предназначенные для преобразования вращательного движения кулачка в возвратно-поступательное движение толкателя, бывают центральные и смещенные, или дезаксиальные. Центральным называют такой кулачковый механизм, у которого линия действия вектора скорости толкателя проходит через центр вращения кулачка. Если же линия действия скорости толкателя проходит на некотором расстоянии е от оси вращения кулачка (рис. 7.5, в, д), то механизм называется смещенным; смещение е принято называть эксцентриситетом механизма.
Пространственные кулачковые механизмы. Наибольшее применение они нашли в счетно-решающих устройствах и машинах-автоматах. На рис. 7.5, е приведена схема коноидного механизма с толкателем, который имеет две степени свободы: перемещение s толкателя 1 является функцией двух независимых переменных φ и x (φ - угол поворота коноида 4).
Основным достоинством кулачковых механизмов является возможность с их помощью воспроизвести широкий класс законов движения, удовлетворяющих определенным условиям, в том числе движение с остановками. Кулачковые механизмы просты по конструкции и имеют сравнительно высокий кпд.
К недостаткам кулачковых механизмов относятся: большие давления в месте контакта высшей пары, из‑за чего механизм может передавать лишь сравнительно малые усилия; большие динамические нагрузки при больших скоростях; высокая трудоемкость изготовления кулачков со сложным профилем.
7.2.2 Кинематический и силовой анализ
Расчеты кулачковых механизмов разных типов основаны на одних и тех же принципах и имеют много общего. Методика расчета рассматривается на примере плоского дискового кулачкового механизма с толкателем (рис. 7.3, 7.5, в, д). Особенности расчета других плоских, а также пространственных кулачковых механизмов приведены в специальной литературе.
Фазы движения толкателя. График перемещения толкателя имеет в общем случае вид, представленный на рис. 7.6. При повороте кулачка на угол φy происходит подъем толкателя (фаза удаления). Затем во время поворота на угол φд толкатель останавливается – наступает фаза дальнего стояния. Следующая фаза – фаза возврата, во время которой толкатель возвращается в исходное положение (угол поворота φв), после чего останавливается в фазе ближнего стояния (угол поворота φб).
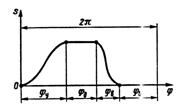
Рисунок 7.6 - График перемещения толкателя
Кинематический анализ. Определим перемещения, скорости и ускорения выходного звена по заданному закону движения входного звена и форме профиля кулачка.
Пусть, например, дан
механизм (рис. 7.7), в котором кулачок очерчен кривой ![]() , где r0 – минимальный
радиус-вектор профиля кулачка; smax ‑ наибольшее перемещение толкателя ;
φ ‑ угол поворота кулачка .
, где r0 – минимальный
радиус-вектор профиля кулачка; smax ‑ наибольшее перемещение толкателя ;
φ ‑ угол поворота кулачка .
Перемещение
выражается функцией ![]() . Скорость и ускорение толкателя при вращении кулачка с
угловой скоростью ω определяются путем дифференцирования функции
. Скорость и ускорение толкателя при вращении кулачка с
угловой скоростью ω определяются путем дифференцирования функции ![]() по времени t:
по времени t:
|
|
(7.4) |
|
|
(7.4`) |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.