Ручное,
отладочное, управление роботом производится через окно, находящееся в правой
части главного окна. Напротив названия оси заносятся координаты и после
нажатием соответствующей кнопки ![]() , робот начинает отработку заданного положения.
, робот начинает отработку заданного положения.
Ниже этого окна находится командная строка. Она служит для отработки заданной в ней команды. Робот начинает отработку команды после нажатии клавиши Enter на клавиатуре компьютера.
Под командной строкой находится кнопка СТОП. Она останавливает перемещение робота только после окончания выполнения действующей команды.
Окно
 информирует о
подключении станков и окна визуализации робота.
информирует о
подключении станков и окна визуализации робота.
Последняя строка показывает состояние робота. Если она закрашена в красный цвет, то в данный момент робот отрабатывает заданное положение.
Окно визуализации (рис. 2) отображает положение робота.
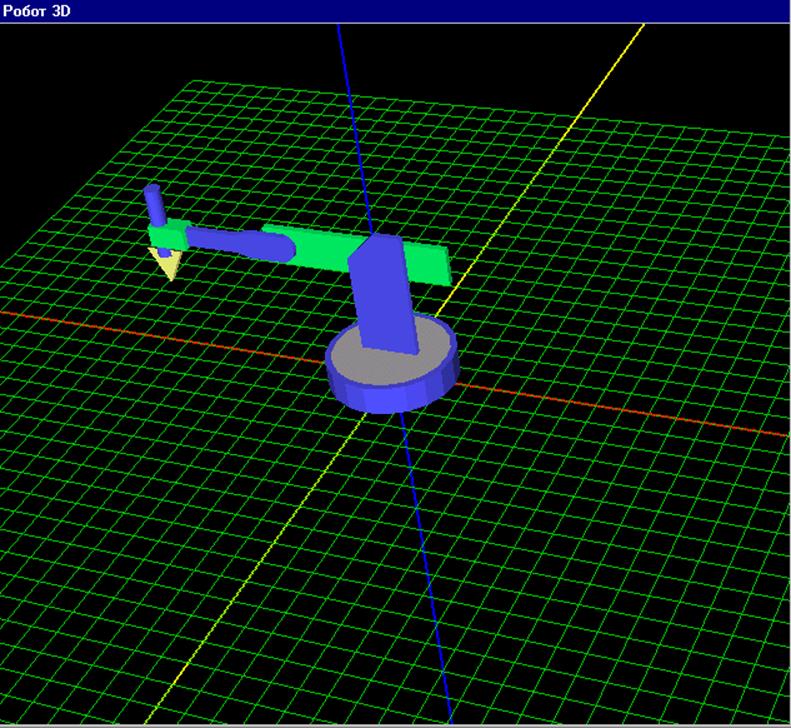
Рис. 103. Окно визуализации робота
Выпадающее меню “Команды” (рис. 3) реализует переключение режимов работы робота, остановку работы и загрузку управляющей программы (рис. 4).
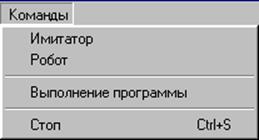
Рис.104. Выпадающее меню “Команды”
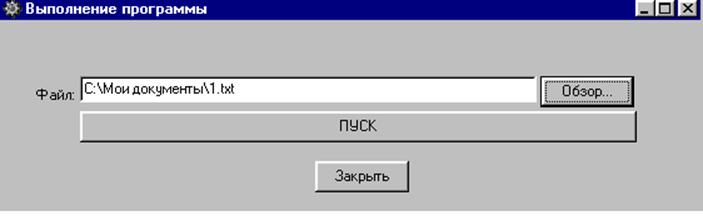
Рис. 105. Окно управляющей программы
Нажатием кнопки “Пуск» запускают в работу нужную управляющую программу (файл с программой).
Управляющий модуль робота является основным модулем в работе с ГПС. В самой управляющей программе робота заложен порядок подключения станков. Этим производится синхронизация работы всей системы.
Прежде чем приступить к работе необходимо:
1. Провести необходимую наладку оборудования.
2. Отработать управляющую программу робота.
3. Отработать управляющие программы к токарному и фрезерному станкам. Эти программы находятся в соответствующих папках станков. По умолчанию их имя gap_program.prg (имя управляющей ГПС- программы можно изменить в первой строке системного файла STANOK.INI, находящийся в папке соответствующего станка).
4. Первым запускается управляющий модуль робота. Затем модули управления станками (переводить станки из режима ИМИТАТОР в режим СТАНОК необязательно, управляющая программа робота автоматически делает перевод и инициализирует оборудование).
5. Перед запуском ГПС робот должен находиться в нулевом положении, для этого его нужно выключить, а затем включить блок управления роботом (автоматически произойдет выход в нулевое положение по всем осям робота).
6. Перевести робот из режима ИМИТАТОР в режим РОБОТ.
7. Запустить управляющую программу робота.
10. МЕТОДИКА ИСПОЛЬЗОВАНИЯ КОНФИГУРАЦИЙ КОМПЛЕКСА
(СТЕНДА) ДЛЯ ЛЕКЦИОННЫХ, ПРАКТИЧЕСКИХ,
ЛАБОРАТОРНЫХ И ИССЛЕДОВАТЕЛЬСКИХ ЗАНЯТИЙ
В лекционных курсах компьютерные имитаторы используются для иллюстрации работы режимов и подрежимов УЧПУ, демонстрации действия функций УП, демонстрации ввода, редактирования и отработки УП. Особенно существенно и эффективно использование компьютерных имитаторов для объяснения наиболее сложных для восприятия вопросов программирования и обеспечения взаимосвязи систем координат УЧПУ, станка и детали, а также ввод и использование в связи с этим параметров и корректоров.
При чтении лекций следует также использовать систему удаленного доступа (INTERNET) для демонстрации на стенде отработки УП при обработке реальной заготовки на малогабаритном станке с компьютерной системой ЧПУ, а также для демонстрации экспериментальных исследований на стенде или их результатов.
Стенд (комплекс) позволяет проводить практические и лабораторные занятия на следующие темы:
- изучение функций УЧПУ;
- изучение программирования обработки деталей на станках с ЧПУ;
- изучение функциональных возможностей режимов и подрежимов современных УЧПУ (в том числе, на основе персональных компьютеров) для программирования УП, обработки деталей, обучения, получения навыков работы с УЧПУ, выполнения исследований;
- изучение взаимосвязи систем координат УЧПУ, станка и детали;
- получение навыков программирования и наладки станков с ЧПУ;
- изучение конструкции и кинематики станков с ЧПУ;
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.