Для контроля перегрузок по току может использоваться датчик тока.
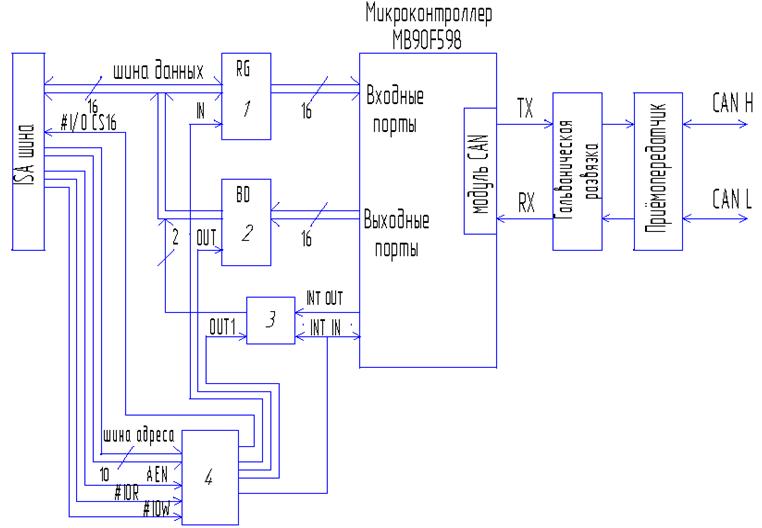
Рис. 53. Схема интерфейсной платы: 1– регистр - приемник данных, 2– выходной буфер данных, 3 – выходной буфер состояния, 4 – дешифратор управляющих сигналов
Блок ЭА (рис.54) также построен на микроконтроллере MB90F598 и имеет возможность подключения к сети CAN.
Основной функцией блока является управление вспомогательным технологическим оборудованием. В зависимости от комплектации станка, блок может управлять зажимом детали (фрезерные станки), резцедержкой и пинолью (токарные станки), загрузочным роботом (если таковой предусмотрен). Соответственно указанным функциям определяется и число реально используемых каналов входа и выхода.
В последних модификациях RCNC – 1 блок ЭА может отсутствовать. В этом случае его функции делят между собой блоки управления приводом.
Сигналы состояния датчиков станка поступают на входные порты блока через формирователи, которые могут включать гальваническую развязку.
Силовая часть приводов и блоки (платы) управления приводами и электроавтоматикой размещены в корпусе системного блока (рис.55,56).
Интерфейсная плата вставляется в ISA –разъем материнской платы системного блока управляющего компьютера.
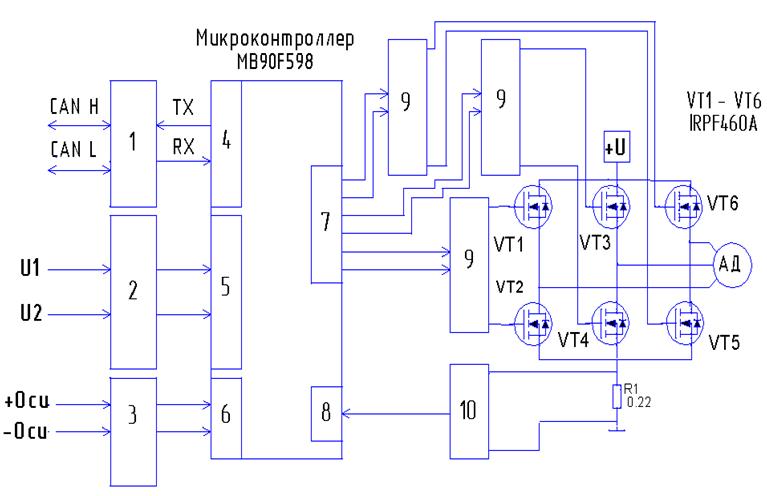
Рис. 54. Схема блока управления приводом : 1- приемопередатчик, 2- формирователь сигналов с датчиков перемещений, 3- формирователь сигналов с конечных выключателей, 4-модуль CAN, 5- модуль захвата, 6- входы прерываний, 7- выходной порт, 8- АЦП, 9- драйвер полумоста, 10- усилитель датчика тока
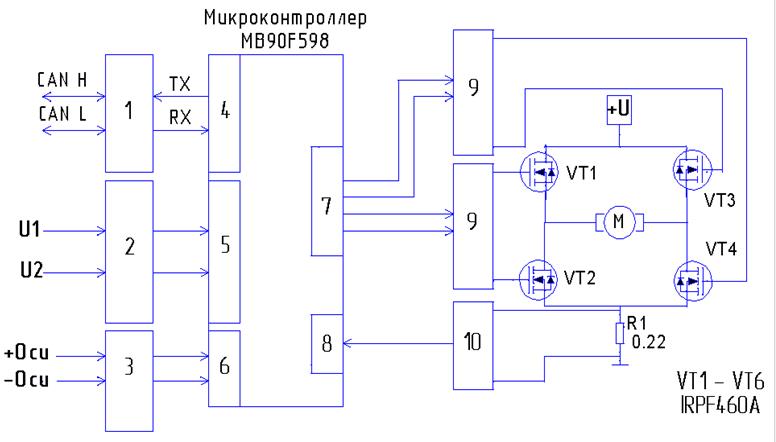
Рис.55. Схема блока управления приводом: 1- приемопередатчик, 2- формирователь сигналов с датчиков перемещений, 3- формирователь сигналов с конечных выключателей, 4-модуль CAN, 5- модуль захвата, 6- входы прерываний, 7- выходной порт, 8- АЦП, 9- драйвер полумоста
10- усилитель датчика тока
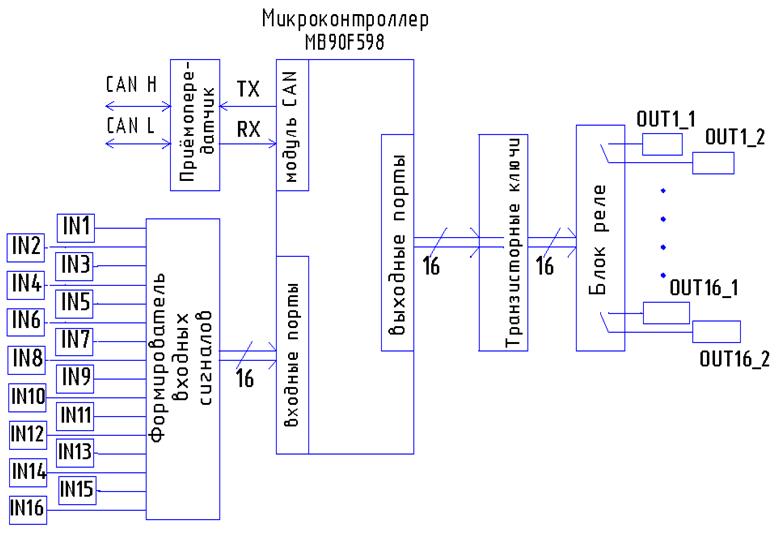
Рис. 56. Схема блока управления электроавтоматикой

Рис.57. Блок управления (вид спереди)
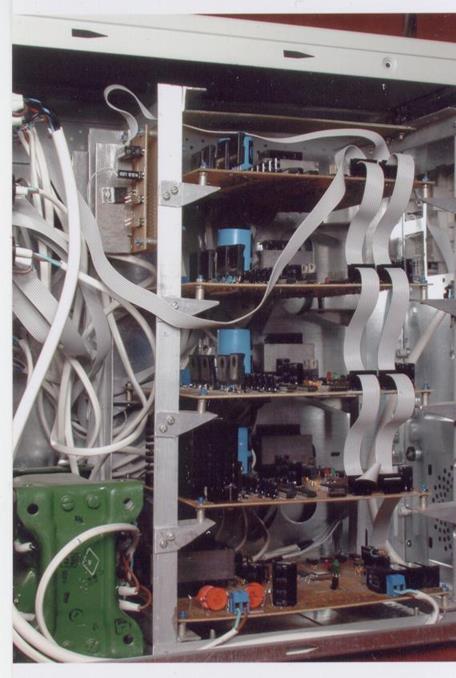
Рис.58. Блок управления (вид справа)
5. 3. Управление двигателями следящих приводов подач
Регулирование скорости путем изменения напряжения на якоре при постоянном крутящем моменте достигается с помощью ШИПа.
На рис.57 показана структурная схема ШИП.
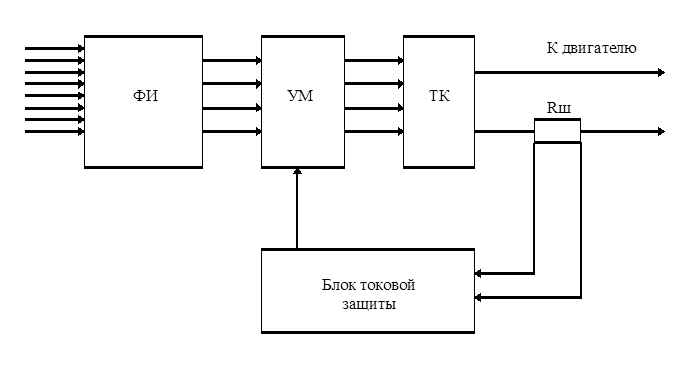
Рис. 59. Структурная схема широтно-импульсного преобразователя
После запуска управляющей программы на отработку происходит считывание команды на включение вращения шпинделя в нужном направлении с заданной частотой, т.е. управляющая программа является задатчиком 3 скорости вращения. Далее в компьютере программно происходит формирование управляющего сигнала и его кодирование.
Регулирование скорости путем изменения напряжения на якоре при постоянном крутящем моменте достигается с помощью ШИПа.
Формирователь импульсов (реализованный программно) подает импульсы на силовые транзисторные ключи в соответствии с алгоритмом поочерёдной коммутации. Силовой транзисторный ключ периодически (с частотой f = 500 Гц и, следовательно, периодом T = 1/f = 2 мс) подключает якорь двигателя М1 к источнику нерегулируемого постоянного напряжения 40В. В рабочую часть периода, когда ключ замкнут, энергия потребляется от источника и расходуется на совершение полезной работы. Часть ее запасается якорем в виде электромагнитной энергии. Во время паузы, когда ТК разомкнут, двигатель продолжает работать за счет запасенной энергии. Таким образом, ключ ТК осуществляет преобразования постоянного напряжения питания U в последовательность равноудаленных и изменяющихся по ширине импульсов, поэтому преобразователь и называют широтно-импульсным.
При поочерёдной коммутации (управлении переключением) логика распределения управляющих импульсов по силовым ключам К следующая: часть периода коммутации открыты ключи К1 и К4 (рис. 58), а ключи К2 и К3 закрыты, далее открывается ключ К2, а К1 закрывается. Затем снова открывается К1 и закрывается К2. В оставшуюся часть периода открывается ключ К3 и закрывается К4 затем К3 закрывается и К4 открывается. В результате напряжение на якоре двигателя имеет вид однополярных прямоугольных импульсов и пропорционально управляющему сигналу. Вращение с вала электродвигателя через червячную передачу передается на ходовой винт.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.