2.3 Регулирование момента асинхронного двигателя с фазным ротором изменением сопротивления в роторной цепи.
Как следует из (1.36) начальный пусковой момент (s=1) с учетом выражения (1.33) можно представить в следующем виде:
 (2.13)
(2.13)
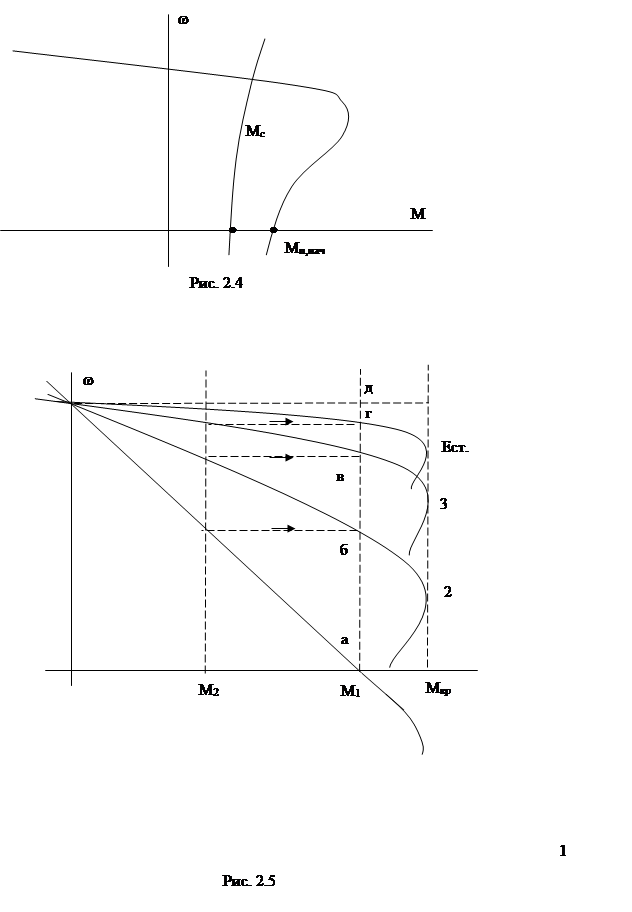
В тех случаях, когда момент сопротивления значителен (тяжелый пуск), двигатель развивает недостаточный динамический момент (рис.2.4) и работает с малым ускорением, процесс запуска затягивается. При этом по статорным и роторным цепям протекают значительные (5-7-кратные) токи, вследствие чего в двигателе выделяются большие электрические потери. В результате из-за срабатывания тепловой защиты процесс запуска двигателявообще не осуществляется.
При увеличении сопротивления ротора за счет
включения добавочного сопротивления r2’доб увеличивается критическое скольжение sкр.доб. Так как обычно sкр<1, функция (2.13) имеет максимум при sкр.доб=1. Следовательно, увеличивая
сопротивление R2’=r2’+r2’доб от r2’ до ![]() можно изменить
момент при s=1 от Мп,нач по (2.13) до Мкр.
можно изменить
момент при s=1 от Мп,нач по (2.13) до Мкр.
Добавочное сопротивление можно выводить частями или полностью. При многоступенчатом пуске (рис.2.5) сопротивление ступеней можно рассчитать приближенно по соотношениям отрезков:
![]()

(2.13)
 |
2.4 Ограничение тока якоря двигателей постоянного тока изменением напряжения.
Из выражения (2.1), справедливого для всех типов двигателей постоянного тока, работающих в установившихся режимах, следует, что снижение напряжения питания является эффективным средством ограничения тока якоря. Плавным изменением напряжения можно обеспечить разгон двигателя без превышения допустимого значения тока.
3. Регулирование скорости.
3.1 Показатели качества регулирования скорости.
Регулирование скорости вращения вала двигателя – это целенаправленное изменение установившейся скорости вращения в соответствии с требованиями, вытекающими из хода технологического процесса.
Для сопоставления и оценки различных способов регулирования используются следующие показатели:
· Диапазон регулирования;
· Точность регулирования;
· Плавность регулирования;
· Экономичность регулирования.
Диапазон регулирования скорости называют отношение максимальной скорости wмакс, обеспечиваемой при выбранном способе регулирования, к минимальной скорости wмин, возможной при данном способе регулирования:
Д=wмакс/wмин. (3.1)
Нижний предел скорости, как правило, ограничивается возможностью поддержания заданной скорости с необходимой точностью при данных условиях вращений.
Точность регулирования оценивается относительным отклонением скорости от заданного значения
d=Dwмакс/wз. (3.2)
На практике точность оценивается величиной статизма механической характеристики электропривода:
s=Dw/w0, (3.3)
Где отклонение скорости Dw определяется как изменение скорости, вызванное изменением нагрузки на валу двигателя от нуля до номинальной, w0 – скорость идеального холостого хода.
Плавность регулирования характеризуется отношением двух последовательных значений скорости, представляющих собой ступени регулирования:
Кпл=wi/wi-1. (3.4)
Экономичность регулирования оценивается по величинам коэффициента полезного действия и коэффициента мощности. При цикличной работе электропривода рассчитываются средние за цикл значения этих коэффициентов.
3.2 Регулирование скорости двигателя постоянного тока с независимым возбуждением изменением напряжеения.
Согласно (1.7), (1.8) изменение напряжения питания якорной цепи (при неизменном возбуждении и неизменном сопротивлении якорной цепи) приводит к изменению скорости идеального холостого хода w0=U/СФ при неизменном отклонении скорости Dw=raI/CФ=raM/(CФ)2. Жесткость механической и электромеханической характеристик не изменится (рис.3.1).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.