Область допустимых режимов работы двигателя аналогична соответствующей области для асинхронных двигателей.
2. Регулирование тока (момента).
2.1 Ограничение тока якоря двигателя постоянного тока с независимым возбуждением изменением сопротивления якорной цепи.
Уравнение электромеханической характеристики (1.8) можно представить следующим образом:
 (2.1)
(2.1)
Для большинства двигателей внутреннее сопротивление rа невелико и в области низких скоростей ток якоря может превышать допустимый по условиям коммутации уровень в несколько раз.
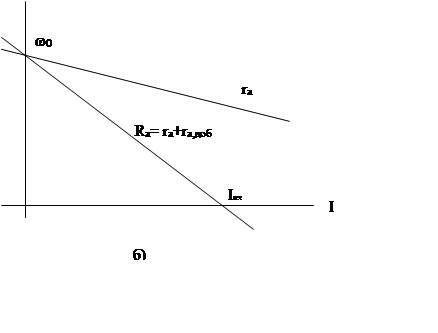 При включении добавочного сопротивления rа,доб (рис.2.2,а) общее сопротивление якорной цепи Rа=rа+rа,доб
увеличивается. Соответственно увеличивается отклонение скорости (1.10) и
снижается ток короткого замыкания (рис.2.1,б) Iкз=U/Ra=U/(ra+ra,доб). Скорость идеального холостого хода
остается неизменной. Между моментом и током якоря сохраняется пропорциональная
зависимость (1.1), поэтому механическая и электромеханическая характеристики
отличаются лишь масштабом по оси абсцисс.
При включении добавочного сопротивления rа,доб (рис.2.2,а) общее сопротивление якорной цепи Rа=rа+rа,доб
увеличивается. Соответственно увеличивается отклонение скорости (1.10) и
снижается ток короткого замыкания (рис.2.1,б) Iкз=U/Ra=U/(ra+ra,доб). Скорость идеального холостого хода
остается неизменной. Между моментом и током якоря сохраняется пропорциональная
зависимость (1.1), поэтому механическая и электромеханическая характеристики
отличаются лишь масштабом по оси абсцисс.
|
||||||
 |
||||||
|
||||||
Введение в якорную цепь добавочных сопротивлений является единственным средством ограничения тока якоря при прямом пуске двигателя. В этом случае добавочное сопротивление называется пусковым.
Пусковые сопротивления рассчитываются с использованием электромеханических характеристик для установившихся режимов, т.е. без учета влияния индкутивности якорной цепи.
При включении в якорную цепь добавочного сопротивления rа,доб=rп1+rп2+rп3 (рис.2.2) реализуется характеристика 1. При заданной нагрузке на валу, определяемой током Ic, рабочая точка, двигатель от а к б, достигает точки к. В этой точке скорость вращения ниже заданной, которой соответствует точка л на характеристике 4, построенной при rа.доб=0. При исключении из якорной цепи всего якорного сопротивления ток якоря достигает недопустимых значений. Поэтому пусковые сопротивления выводятся из якорной цепи по частям. При этом имеем семейство промежуточных характеристик. Траектория движения рабочей точки называется пусковой диаграммой. Управление переключениями пусковых сопротивлений проще всего организовать с использованием токовых реле. Для упрощения схемы управления пусковая диаграмма должна быть «правильной». При работе двигателя на правильной пусковой диаграмме все переключения должны производиться при одном и том же токе (ток I2 на рис.2.2). Должны быть одинаковы также наибольшие токи (ток I1) при работе на каждой из характеристик. Для приведенного на рис.2.2 варианта правильная пусковая диаграмма представляет собой траекторию а-б-в-г-д-ж-з-и-л.

При выведении из якорной цепи сопротивления rп1 рабочая точка из в перемещается в точку с. Так как скорость вращения двигателя в этих точках одинакова (Eв=CФwв=Ес=СФwс), то

 (2.3)
(2.3)
Аналогичным образом получим выражения:
 (2.4)
(2.4)
 (2.5)
(2.5)
В (2.3)-(2.5) wв, wс,…, wз – скорость вращения двигателя в соответствующей точке. Следовательно, обозначить отношение токов I1/I2 как l, можем записать:
 (2.6)
(2.6)
С учетом того, что
Rn3=ra+rn3,
Rn2=Rn3+rn2=ra+rn3+rn2,
Rn1=Rn2+rn1=ra+rn3+rn2+rn1
получим соотношения:
Rn3=ral,
Rn2=Rn3l=ral2, (2.7)
Rn1=Rn2l=ral3.
В общем случае для m-ступенчатого пуска двигателя
 (2.8)
(2.8)
При заданной кратности токов число пусковых сопротивлений равно
 .
(2.9)
.
(2.9)
Расчет пусковых сопротивлений производят следующим образом:
· Определяют Rп1=U/I1;
· Задаются величиной l=I1/I2;
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.