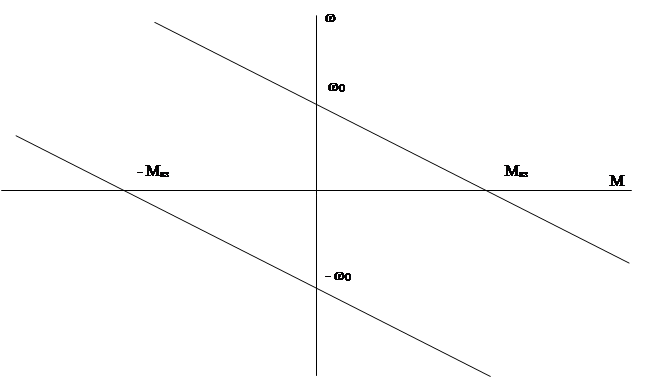
Характеристики (1.7), (1.8) установившихся режимов являются линейными. При изменении полярности напряжения источника питания якорной цепи или изменения направления магнитного потока направление вращения двигателя изменится (рис.1.1).
Форма механических и электромеханических характеристик оценивается величинами жесткости этих характеристик:
 (1.12)
(1.12)
 (1.13)
(1.13)
Тогда выражения (1.7), (1.8) можно представить в следующем виде:

![]() (1.14)
(1.14)
![]() (1.15)
(1.15)
 |
|||
 |
|||
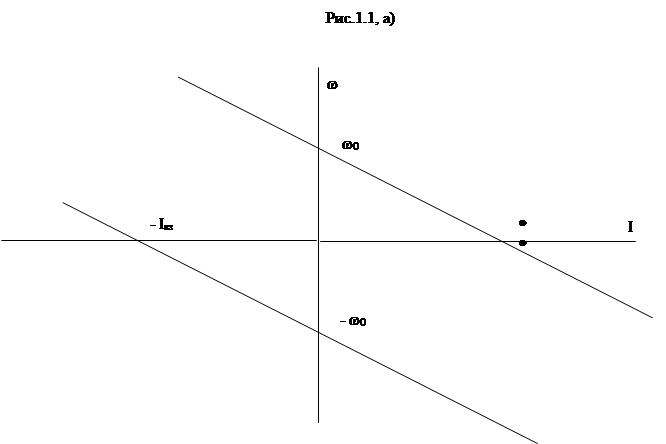 |
Рис.1.1, б)
Здесь bI,aвs, bM,aвs – модули жестокостей.
В процессе преобразования энергии необходимо учитывать ограничения
· По допустимому току Iдоп (по перегрузочной способности);
· По максимально допустимой скорости вращения.
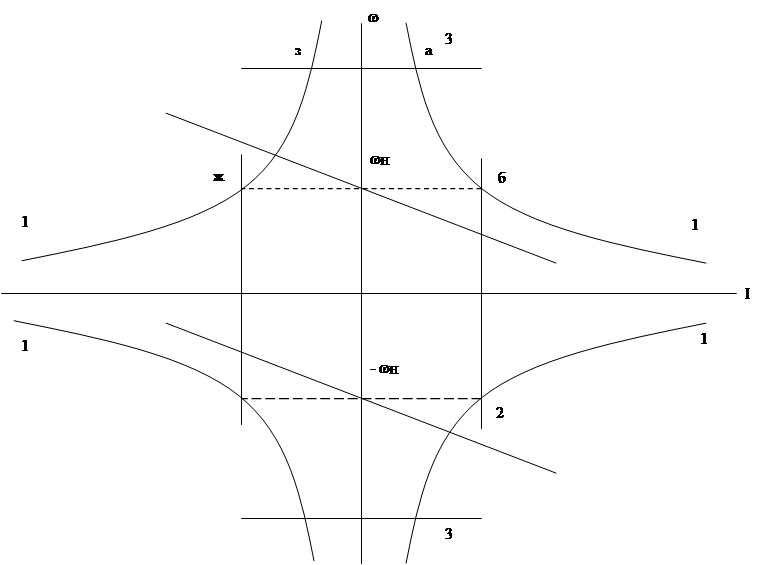
Ограничения по перегрузочной способности lI=Iдоп/IН определяется условиями коммутации. Так как при одном и том же значении тока при увеличении скорости вращения коммутация ухудшается, то допустимая по условиям коммутации область рабочих режимов ограничивается кривыми 1 (рис.1.2), которые близки к гиперболическим зависимостям [4]. Иногда для низких скоростей (çwú<wH) в качестве допустимого принимают значение тока при номинальной скорости (прямые 2). Тогда с учетом ограничения скорости вращения (прямые 3) допустимыми являются режимы, при которых рабочая точка не выходит за пределы фигуры абвгдежз. На рис.1.2 приведены также естественные электромеханические характеристики (прямые 4).
 |
|
|
|
|
|
|
|
|
1.3 Характеристики двигателей постоянного тока с последовательным возбуждением в установившихся режимах.
В переходных режимах, когда ток якоря превышает номинальное значение, магнитная цепь машины насыщается. В установившихся режимах двигатель работает на участке кривой намагничивания, для которой характеристика близка к линейной зависимость потока возбуждения от тока якоря. Следовательно, в зависимости от режима работы двигателя индуктивность Lв обмотки последовательного возбуждения может применяться несколько раз (от наибольшего при малых токах до наименьшего при i>IН). Это приводит к изменению суммарной индуктивности якорной цепи.
Процесс преобразования энергии описывается уравнениями (1.1)-(1.3) с учетом отмеченного характера изменения величины Lа. Следовательно, механические и электромеханические характеристики описываются уравнениями (1.5)-(1.8), в которых поток возбцждения зависит от величины тока якоря: Ф=Ф(i).
При малых значениях тока якоря (рис.1.3, i<I1) поток возбуждения пропорционален току:
Ф=Кфi
В этой области изменения тока электромеханическая характеристика (1.8) описывается выражением:
 (1.16)
(1.16)
Отсюда следует, что при малых нагрузках электромеханическая характеристикадвигателя описывает гиперболическую зависимость между током и скоростью вращения.
Характеристика
 (1.17)
(1.17)
Называется граничной характеристикой.
Из (1.16), (1.17) видно, что при уменьшении тока якоря скорость вращения стремится к бесконечности, т.е. ось ординат (ось w) является асимптотой для этих характеристик.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.