Здесь в соответствии с (4.10) при неизменном значении постоянного тока Iп значение переменного тока Iпер так же неизменно и конец вектора при изменении тока ротора перемещается по окружности радиуса Iпер.
В рассматриваемых условиях выражения для электромагнитного момента можно определить в соответствии с (1.29). в этом выражении произведение w,s характеризуют отклонение скорости вращения ротора от скорости поля статора wст: Dw=w1s=wcт-w. В режиме динамического торможения скорость поля статора равна нулю. Следовательно, в этом случае
Dw=-w=-nw1. (4.12)
Тогда
 (4.13)
(4.13)
![]() Так как
Так как
E1=E2’=Z2’I2’,
 ,
, (4.14)
(4.14)
То выражение (4.11) преобразуется к виду
 (4.15)
(4.15)
Выразив из (4.15) I2’ и подставив найденное значение тока в (4.13), получим:
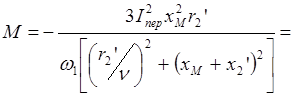
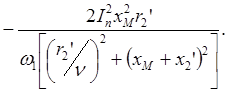 (4.16)
(4.16)
![]()
При торможении с отрицательной скорости в (4.16) следует принять знак «плюс».
Сопротивление полученного выражения с (1.31) показывает, что в формировании момента двигателя в режиме динамического торможения с независимым возбуждением значение постоянного тока Iп (после перерасчета – значение переменного тока Iпер) играет ту же роль, что и фазное напряжение для нормальной схемы включения. Это объясняется тем, что роль этих физических величин одинакова при формировании потока возбуждения.
При n=0 и n®¥ момент, определяющий согласно (4.16), равен нулю. При энергии относительной скорости
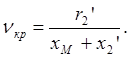 (4.17)
(4.17)
момент достигает максимального значения:
 (4.18)
(4.18)
Из сопоставления выражений (1.33) и (4.17) следует, что относительное значение критической скорости существенно ниже критического скольжения:
nкр<sкр (4.19)
На рис.4.20 приведены механические характеристики при динамиеском торможении с не зависимым возбуждением.
Для создания режима динамического торможения с самовозбуждением к статору, отключенному от сети, подключаются конденсаторы (рис.4.21). При вращении ротора создается ЭДС в цепи статора, через конденсаторы протекает ток. Самовозбуждение возникает при больших значениях скоростей и больших емкостях конденсаторов и существует в ограниченном диапазоне скоростей (рис.4.22). недостатки рассматриваемого тормозного режима ограничивают области его применения.
4.6 Торможение синхронных двигателей.
Для синхронных двигателей приемлемым является только режим динамического торможения с независимым возбуждением. При этом обмотка возбуждения продолжает питаться от источника постоянного тока, а обмотки статора подключаются к включенным в звезду активным сопротивлениям. Процесс торможения соответствует рассмотренному в п.4.5.3 для асинхронного двигателя динамическому торможению с независимым возбуждением. Аналогичный вид имеют и механические характеристики этого режима.
Список литературы
1. Андреев В.П., Сабинин Ю.А. Основы электропривода. –Л. –М.: Госэнергоатомиздат, 1963.
2. Ключев В.И. Теория электропривода: Учебник для вузов –М.: Энергоатомиздат,1985.
3. Ковчин С.А., Сабинин Ю.А. Теория электропривода. –С-Пб.: Энергоиздат, 1994.
4. Ильинский Н.Ф., Казаченко В.Ф. Общий курс электропривода: Учебник для вузов –М.: Энергоатомиздат, 1992.
5. Вешеневский С.Н. Характеристики двигателей в электроприводе. –М. –Л.: Энергия, 1977.
6. Вольдек А.И. Электрические машины. –М.-Л.: Энергия, 1966.
Содержание
Предисловие 2
1. Модели двигателей в установившихся режимах.
1.1 Механические и электромеханические характеристики 3 двигателей.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.