В приближенных расчетах принимают: r1sкр<<r’2. тогда получим упрощенную формулу Клосса:
 (1.37)
(1.37)
Построенная по формулам (1.31), (1.36) механическая характеристика приведена на рис.1.9 (на рис.1.9,а как функция s(М), а на рис.1.9.б – функция w(М)).
При работе двигателя с малыми скольжениями (s<sкр)
механическая характеристика близка к линейной (М![]() 2Мкрs/sкр), а в области
больших значений скольжений (s>sкр) имеет приблизительно гиперболический
2Мкрs/sкр), а в области
больших значений скольжений (s>sкр) имеет приблизительно гиперболический
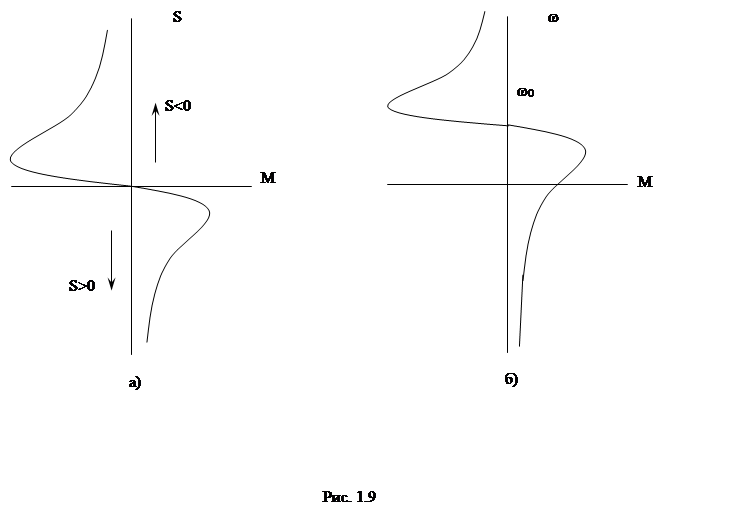 |
характер: М![]() 2Мкрsкр/s. Критический
момент в генераторном режиме работы двигателя (в режиме рекуперации энергии в
сеть) Мкр,г превышает соответствующий момент Мкр,д в двигательном
режиме. Из (1.34) следует, что
2Мкрsкр/s. Критический
момент в генераторном режиме работы двигателя (в режиме рекуперации энергии в
сеть) Мкр,г превышает соответствующий момент Мкр,д в двигательном
режиме. Из (1.34) следует, что
 (1.38)
(1.38)
Жесткость механической характеристики
зависит от величины скольжения.
При |s|<sкр жесткость dM/ds положительна, а жесткость dM/dw отрицательна. Этой области скольжения соответствует рабочая часть механической характеристики. При |s|³sкр знаки жесткостей меняются и в этой области двигатель в установившихся режимах работать не может.
В формировании электромагнитного момента участвует лишь активная составляющая тока ротора. Исходя из этого
М=СФI2’Cosj2, (1.39)
Где Ф – результирующий магнитный поток,
Область допустимых режимов работы двигателя приблизительно соответствует рис.1.2. при этом ограничение по перегрузочной способности (прямые 2) проявляется в ограниченности развиваемого двигателем моментов значениями Мкр. При этом следует учесть, что момент двигателя имеет повышенную чувствительность к изменению напряжения из-за квадратичной зависимости (М~U12). ГОСТ 13109-97 допускает предельное отклонение напряжения на уровне ±10% от номинального значения. Реальные отклонения напряжения могут быть более значительными. С учетом этого перегрузочную способность двигателя следует определять по значению Mкр(U1/U1H)2.
Повышение скорости выше номинальной можно осуществить повышением частоты питающего напряжения. При этом напряжение питания сохраняется на номинальном уровне, а критическое значение электромагнитного момента изменяется приблизительно по гиперболической зависимости.
Вид электромеханической характеристики s(I2’), w(I2’) можно установить, произведя анализ выражения (1.30).
При s®±¥ ток ротора стремится к асимптоте
 (1.40)
(1.40)
В режиме рекуперации при скольжении sM=-r2’/r1 ток ротора достигает максимального значения
 (1.41)
(1.41)
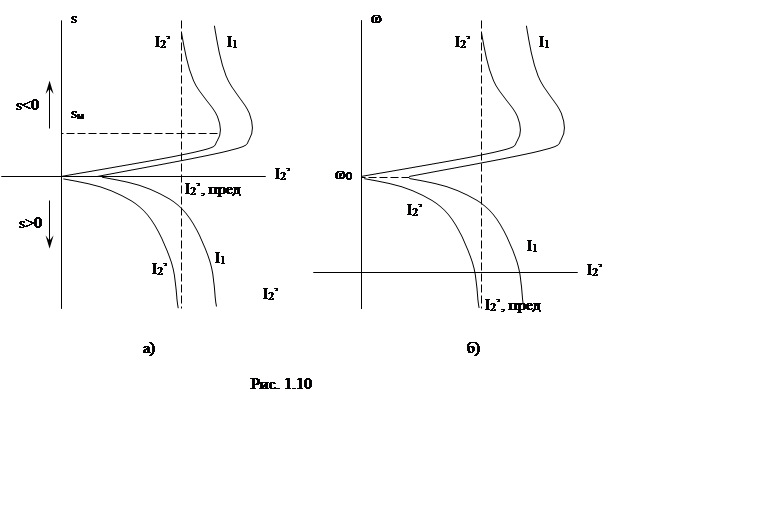
Зависимости s(I2’), w(I2’) приведены на рис.1.10.
Электромеханическая характеристика s(I1), w(I1) отличается от характеристики s(I2’), w(I2’) увеличением тока I1 по отношению к I2’ за счет влияния тока намагничивания. При s=0 ток намагничивания наименьший и равен IМ0,а с увеличением ½s½ несколько растет. В целом зависимость от s, аналогичную зависимости I2’ от s (рис.1.10).
 |
1.6 характеристики синхронных двигателей в установившихся режимах.
Электромагнитная мощность двигателя равна
Рэм=3U1I1Cosj1 (1.42)
Здесь U1 I1 – напряжение питания фазы и ток фазы статора.
Спроектируем все векторы на ортогональные оси d, q, ориентированные относительно ЭДС. Тогда можно написать следующие уравнения:
![]() I1q=I1Cosy,
I1q=I1Cosy,
I1d=I1Siny,
U1Cosq=E+xdI1d, (1.43)
U1Sinq=xqI1q
Тогда
![]()
Определяя I1d и I1q и двух последних уравнений системы (1.42) получим:
 (1.44)
(1.44)
Так как Рэм=Мw1, получим выражения для электромагнитного момента в следующем виде:
 (1.45)
(1.45)
Для машин в неявнополюсном исполнении хd=хq.
Из (1.45) следует, что при явнополюсном исполнении двигателя развиваемый им момент (рис.1.12) содержит основную составляющую
 |
 и дополнительную
составляющую
и дополнительную
составляющую  . Максимуму
момента соответствует угол qМ, который можно определить из условия
. Максимуму
момента соответствует угол qМ, который можно определить из условия  . Номинальному режиму
соответствует рабочий угол qн=p/9…p/6.
. Номинальному режиму
соответствует рабочий угол qн=p/9…p/6.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.