Связанные системы регулирования включают кроме основных регуляторов дополнительные динамические компенсаторы. Расчет и наладка таких систем гораздо сложнее, чем одноконтурных АСР, что препятствует их широкому применению в промышленных системах автоматизации.
Рассмотрим методы расчета многосвязных систем регулирования на примере объекта с двумя входами и двумя выходами.
3.1.1.Синтез несвязанного регулирования
Структурная схема системы представлена на рисунке 3.1 Преобразование системы регулирования двух координат к эквивалентным одноконтурным АСР дано на рисунке 3.2
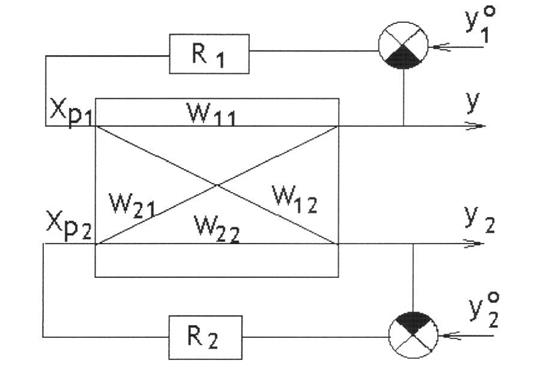
Рисунок 3.1 - Структурная схема несвязного регулирования со взаимосвязанными координатами
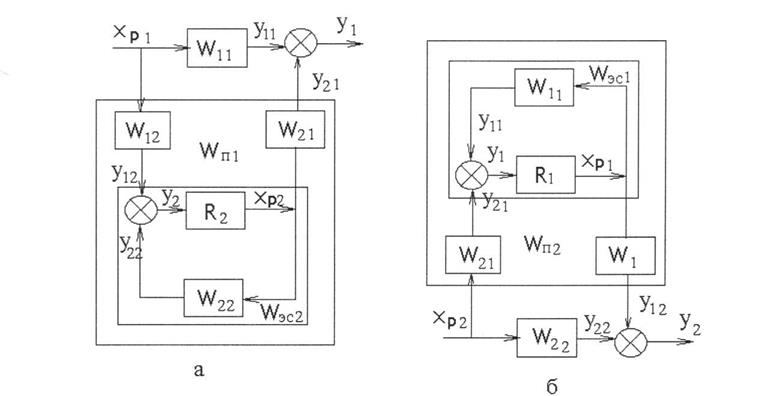
Рисунок 3.2 - Преобразование системы регулирования двух координат к эквивалентным одноконтурным АСР
а - эквивалентный объект для первого регулятора; б - эквивалентный объект для второго регулятора.
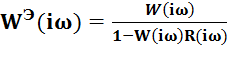
Выведем передаточную функцию эквивалентного объекта в одноконтурной АСР с регулятором R1. Как видно, такой объект состоит из основного канала регулирования и связанной с ним параллельно сложной системы, включающей второй замкнутый контур регулирования и два перекрестных канала объекта. Передаточная функция эквивалентного, объекта имеет вид:
![]() ;
;
Второе слагаемое в правой части уравнения (7) отражает влияние второго контура регулирование на рассматриваемую и по существу является корректирующей поправкой к передаточной функции прямого канала.
Аналогично для второго эквивалентного объекта получим передаточную функцию в виде:
![]()
На основе формул можно предположить, что если на какой-то частоте модуль корректирующей поправки будет пренебрежимо мал по сравнению с амплитудно-частотной характеристикой прямого канала, поведение эквивалентного объекта на этой частоте будет определятся прямым каналом.
Наиболее важно значение поправки на рабочей частоте каждого контура. В частности, если рабочие частоты двух контуров регулирования copi и озр2 существенно различны, то можно ожидать, что взаимное влияние их будет незначительным при условии:
|Wп2(iωpl)| << |W11(iωpl)| ; (9)
Где |Wп2(iωpl)| = ![]()
Наибольшую опасность представляет случай, когда инерционность прямых и перекрестных каналов приблизительно одинакова. Пусть например, Wn(p)=W12(p)=W21(p)=W22(p)=W(p). Тогда для эквивалентных объектов при условии, что R1(p)=R2(p)=R(p), получим передаточные функции:
![]() ; (10)
; (10)
частотные характеристики
 (11)
(11)
На границе устойчивости, согласно критерию Найквиста получим:
![]() или
или ![]() ; (12)
; (12)
Откуда ![]() =l или
|R(iω)|=0.5/|W(iω)|
=l или
|R(iω)|=0.5/|W(iω)|
Так, настройка П - регулятора, при которой система находится на границе устойчивости, вдвое меньше, чем в одноконтурной АСР.
Для качественной оценки взаимного влияния контуров регулирования используют комплексный коэффициент связанности:
![]() ;(13)
;(13)
который обычно вычисляют при нулевой частоте (т.е. в установившихся режимах) и на рабочих частотах регуляторов copi и соР2. В частности, при ш=0 значение ксВ определяется отношением коэффициентов усиления по перекрестным и основным каналам:
ксв (0)=Ri2 R21 /(R11 R22); (14) Если на этих частотах ксВ =0, то объект можно рассматривать как односвязный, при ксВ>1 целесообразно поменять местами прямые и перекрестные каналы; 0<ксВ<1 расчет одноконтурных АСР необходимо вести по передаточным функциям эквивалентных объектов (7) и (8).
Рассчитаем ксВ для нашего варианта:
kcв=(ki2*k2i)/(k11*k22)=(0.47*0.0085)/(0.015*3.25)~0.11
3.1.2 Системы связанного регулирования
На рисунке 8 представлены структурные схемы автономных АСР
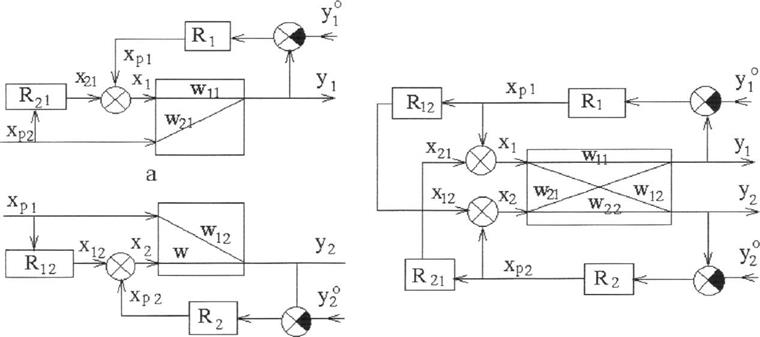
Рисунок 3.3 – структурные схемы автономных АСР
а - компенсация воздействий от второго регулятора в первом контуре регулирования;
б - компенсация воздействий от первого регулятора во втором контуре регулирования;
в - автономная система регулирования двух координат. Рисунок Рисунок 8 - Структурные схемы автономных АСР
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.