решения с обеспечением требуемой плавности хода.
8.2. Результаты математического моделирования и их анализ.
Графики приведенных моментов и график w1(j1). Объяснение причин изменения w1 по каждому участку.
ВВЕДЕНИЕ
Целью данной работы являются исследование и синтез машины – механического пресса (с механизмом подачи). Основными задачами работы являются кинематический синтез и анализ главного механизма, выбор двигателя и проектирование зубчатого механизма, силовой расчет главного механизма, исследование динамики работы машины и обеспечение требуемой плавности хода.
На рис.1 представлена схема исследуемого механического пресса :
Задачи решаемые в курсовом проекте:
1. Структурный и кинематический синтез главного механизма;
2. Кинематический анализ главного механизма;
3. Определение инерционных параметров главного механизма;
4. Определение внешних нагрузок;
5. Проектирование зубчатого механизма;
6. Силовой расчет главного рычажного механизма;
7. Исследование динамики работы машины.
Принятые сокращения и обозначения:
НСК – неподвижная система координат
ЛСК – локальная система координат, система координат связанная со звеном и движущаяся вместе с ним.
1. СТРУКТУРНЫЙ АНАЛИЗ ГЛАВНОГО МЕХАНИЗМА
Структура главного механизма фиксирована в техническом задании. На рис. 1.1 представлена его структурная схема.
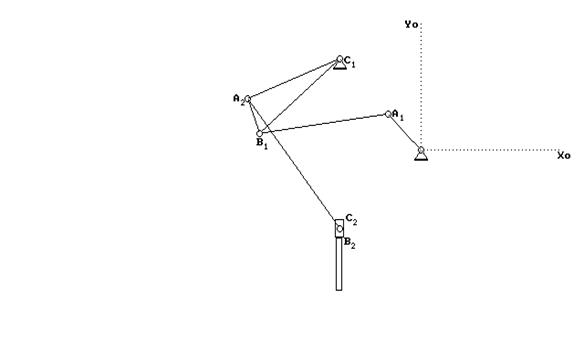
Рис. 1.1
Главный механизм состоит из 5 подвижных звеньев: 1 – кривошип, 2 и 4 – шатуны, 3 – коромысло, 5 – ползун. Число степеней свободы:
Структурно механизм делится на входное звено – кривошип (рис.1.2) и две структурные группы (рис.1.3).
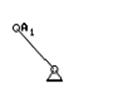
Рис. 1.2
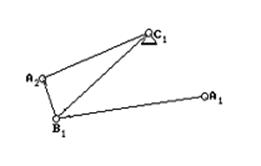
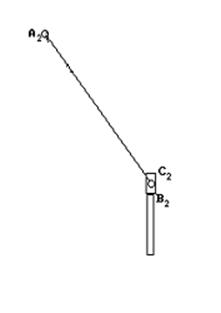
Рис. 1.3 Количество степеней свободы для главного механизма.
W= 3n - 2p5 - p4=3*5-2*7-0=1
Где n – число подвижных звеньев, pk – количество кинематических пар k-го класса.
По классификации Асура – Артоболевского обе структурные группы имеют 2-й класс, 2-й порядок, следовательно и весь механизм является механизмом 2-го класса, 2-го порядка.
2. КИНЕМАТИЧЕСКИЙ АНАЛИЗ ГЛАВНОГО МЕХАНИЗМА
2.1. Постановка задачи.
Задачу кинематики для механизма с числом степеней свободы, равным 1, можно сформулировать следующим образом: при известном характере движения входного звена механизма определить характер движения остальных звеньев механизма.
В техническом задании дано значение частоты вращения кривошипа n1 = 50 об/мин. Кривошип вращается с постоянной угловой скоростью ω1=πn1/30= 5,23 с-1 , при этом время оборота Т= 1,2 с.
На рис.2.1 приводится рисунок планов механизма за полный оборот кривошипа в 12 положениях.
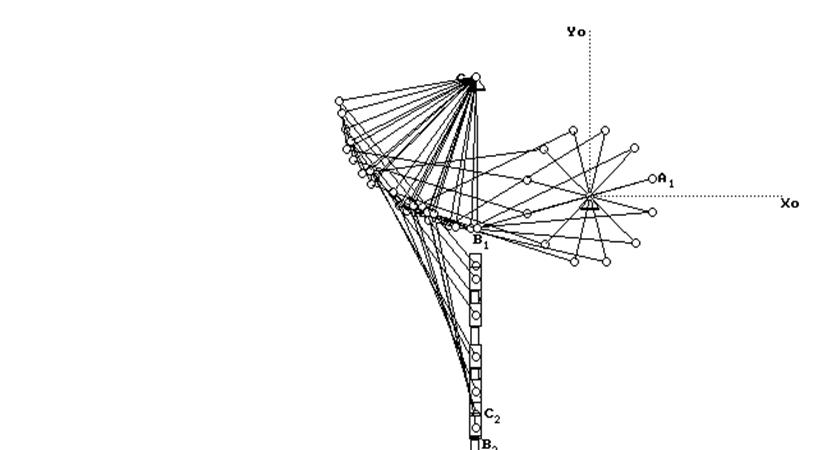
Рис. 2.1
2.2. Кинематический анализ в одном положении механизма
Производится в одном положении механизма (называемом в дальнейшем «расчетным»), характеризующемся углом поворота кривошипа φ1=150° от начала цикла. Под началом цикла будем понимать положение кривошипа, при котором ползун занимает крайнее верхнее положение. Это положение соответствует углу поворота кривошипа от оси Х0 φi min = 169,35 °, соответственно, конец цикла характеризуется углом φi max = φi min + 360° = 529,35 °.
2.2.1. Метод векторных контуров.
Суть метода векторных контуров состоит в следующем. Звенья механизма представляются в виде векторов; поскольку механизм замкнут, то эти векторы образуют замкнутые контуры. Векторные уравнения замкнутых контуров проецируют на оси координат и получают системы алгебраических уравнений для определения кинематических параметров, характеризующих положения звеньев: углов поворота и перемещений. Последовательно дифференцируют эти зависимости, получают уравнения для определения скоростей и ускорений.
2.3. Кинематические диаграммы а) Перемещение, скорость и ускорения ползуна 5 рис.2.3.1
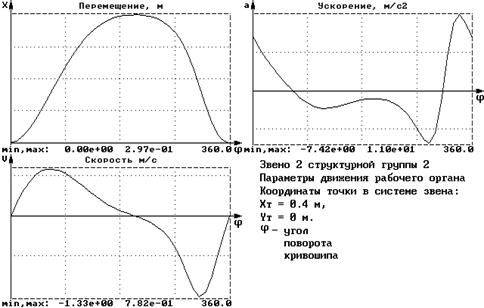
Рис. 2.3.1
Перемещение, скорость и ускорение рабочего органа
Координаты точки в системе звена:
Xk = 0.4 м
Yk = 0 м
i Fi1 S V a
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.