7. 70.00 8.6569e-001 34.44 7.1396e-001 4.8957e-001
8. 80.00 1.2293e+000 62.81 5.6178e-001 1.0934e+000
9. 90.00 1.6019e+000 76.42 3.7611e-001 1.5571e+000
10. 100.00 1.8800e+000 84.80 1.7046e-001 1.8723e+000
11. 110.00 2.0411e+000 91.16 -4.1157e-002 2.0406e+000
12. 120.00 2.0891e+000 96.74 -2.4526e-001 2.0747e+000
13. 130.00 2.0428e+000 102.16 -4.3014e-001 1.9970e+000
14. 140.00 1.9294e+000 107.72 -5.8728e-001 1.8378e+000
15. 150.00 1.7795e+000 113.60 -7.1243e-001 1.6307e+000
16. 160.00 1.6231e+000 119.78 -8.0609e-001 1.4088e+000
17. 170.00 1.4847e+000 126.02 -8.7310e-001 1.2009e+000
18. 180.00 1.3818e+000 131.82 -9.2139e-001 1.0298e+000
19. 190.00 1.3252e+000 136.46 -9.6060e-001 9.1284e-001
20. 200.00 1.3220e+000 139.19 -1.0006e+000 8.6407e-001
21. 210.00 1.3817e+000 139.47 -1.0502e+000 8.9788e-001
22. 220.00 1.5213e+000 137.22 -1.1166e+000 1.0332e+000
23. 230.00 1.7698e+000 132.84 -1.2035e+000 1.2977e+000
24. 240.00 2.1698e+000 127.09 -1.3084e+000 1.7309e+000
25. 250.00 2.7724e+000 120.74 -1.4170e+000 2.3829e+000
26. 260.00 3.6197e+000 114.33 -1.4914e+000 3.2981e+000
27. 270.00 4.6935e+000 108.05 -1.4540e+000 4.4626e+000
28. 280.00 5.7967e+000 101.67 -1.1720e+000 5.6770e+000
29. 290.00 6.3643e+000 94.35 -4.8294e-001 6.3459e+000
30. 300.00 5.4239e+000 82.95 6.6613e-001 5.3828e+000
31. 310.00 2.6876e+000 43.21 1.9588e+000 1.8402e+000
32. 320.00 4.4450e+000 -52.75 2.6907e+000 -3.5380e+000
33. 330.00 8.4074e+000 -73.16 2.4357e+000 -8.0468e+000
34. 340.00 9.8629e+000 -80.60 1.6110e+000 -9.7305e+000
35. 350.00 9.1105e+000 -84.28 9.0873e-001 -9.0651e+000
36. 0.00 7.4750e+000 -85.43 5.9539e-001 -7.4513e+000
Alf - ууюы яютю
Н 169.35 Ја. ®в ®бЁ Xo
3. ИНЕРЦИОННЫЕ ПАРАМЕТРЫ ГЛАВНОГО МЕХАНИЗМА
3.1. Массы и моменты инерции звеньев.
Для вычисления моментов инерции использовались следующие формулы:
J1= 2,5*m1*l²1π/30
Ji= mi*l²iπ/30, i=2, 3, 4
где li - длинна звена или его наибольший размер.
Эмпирический коэффициент 2,5 в формуле момента инерции кривошипа учитывает дополнительные массы при его уравновешивании.
Значения масс звеньев и их моменты инерции указаны в таблице №1
Таблица № 1
Звенья |
Массы звеньев, кг |
Моменты инерции, кг*м² |
|
1 |
100 |
0,409 |
|
2 |
34 |
0,436 |
|
3 |
29 |
0,238 |
|
4 |
54 |
0,904 |
|
5 |
130 |
- |
3.2. Приведение масс и моментов инерции.
Приведенный момент инерции характеризует инерционные свойства механизма так, что величина Jпрω²1/2 в каждый момент времени есть кинетическая энергия, которой суммарно обладают все звенья механизма. Поскольку шарнирно-рычажный механизм в процессе движения меняет свою конфигурацию, величина приведенного момента инерции меняется и является функцией положения, в данном случае – угла поворота кривошипа.
Функция Jпр(φ1) вычисляется для каждого положения механизма по формуле:
Jпр(φ1) = 
Эта формула получена из условия равенства кинетических энергий механизма и звена приведения, т.е. приведенный момент инерции является мерой инертности всего механизма.
Для расчетного положения:
Jпр(φ1)= J1 + m2(VS2/ω1)² + J2(ω2/ ω1)² + m3(VS3/ω1)² + J3(ω3/ ω1)² + m4(VS4/ω1)² + J4(ω4/ ω1)² + m5(V5/ω1)² = 7,765 кг*м²
На рис. 3.1 приведен график приведенного момента инерции за цикл:
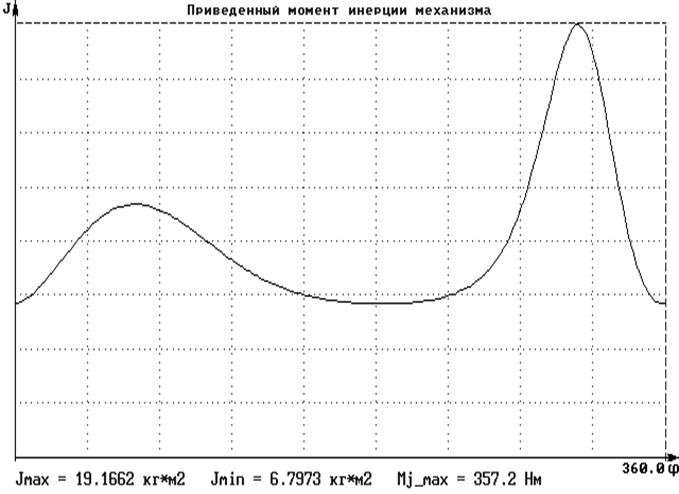
Рис. 3.1
4. ВНЕШНЯЯ НАГРУЗКА
По заданию на рабочем участке хода ползуна действует технологическая сила FT = 44 кН рис. 4.1. Рабочий участок располагается на прямом ходе ползуна, когда он движется сверху вниз. Величина рабочего хода: Sp=0,25 Sп.
где Sп – полный ход рабочего ползуна.
Sp=0,25*0.28=0.07 м
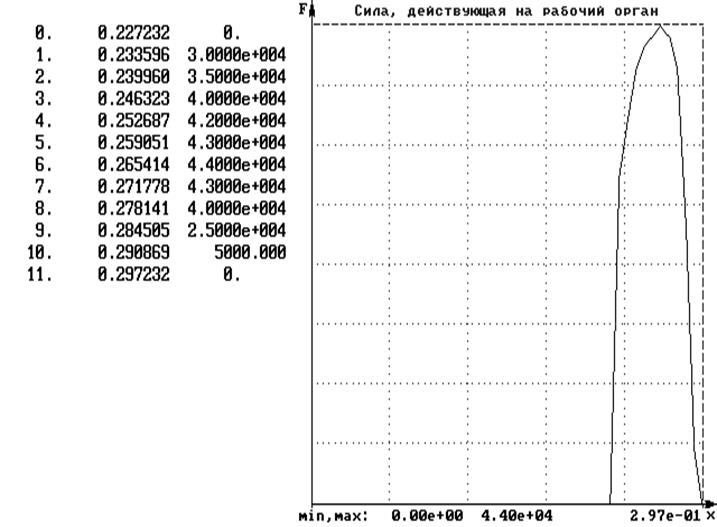
Рис. 4.1
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.