Циліндр 3 одним кінцем кріпиться до кронштейна на стінці шпангоута № 6, а другим - до кронштейна на стійці.
Замок 1 прибраного положення кріпиться до стелі ніші передньої опори, а замок 5 випущеного положення - до нижньої частини стінки шпангоута № 6.
На кожному замку є свій гідроциліндр відкриття замку.
13.3 РОБОТА
ВИПУСК ПЕРЕДНЬОЇ ОПОРИ
У основному режимі при поданні тиску рідини гідроциліндр 2 відкриває замок 1 прибраного положення і силовий гідроциліндр 3 випускає стійку до постановки її підвіскою 6 на замок 5 випущеного положення.
Кінематика створок дозволяє на початку процесу випуску відкрити усі створки, а у кінці - закрити великі. Малі створки залишаються відкритими.
ПРИБИРАННЯ ПЕРЕДНЬОЇ ОПОРИ
При поданні тиску рідині в гідроциліндр 4 відкриває замок 5 випущеного положення і силовий циліндр 3 прибирає стійку до постановки її підвіскою 7 на замок прибраного положення.
На початку процесу прибирання йде відкриття великих створок, а у кінці - ніша передньої опори закривається великими і малими створками.
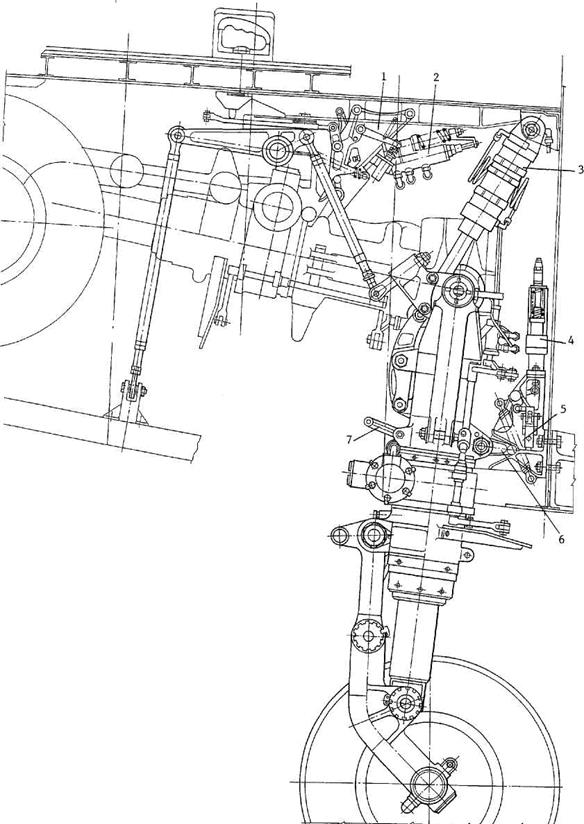
1 – замок убраного положення
2 – гідроциліндр замка прибраного положення
3 – гідроциліндр прибирання-випуску стійки
4 – гідроциліндр замка випущеного положення
5 – замок випущеного положення
6 – підвіска замка випущеного положення
7 – підвіска замка прибраного положення
Рис.1 Механізм прибирання-випуску ПОШ
14.СИСТЕМА МЕХАНІЧНОГО ВИПУСКУ ПЕРЕДНЬОЇ ОПОРИ –
ОПИС І РОБОТА
14.1 ЗАГАЛЬНІ ВІДОМОСТІ
Система призначена для механічного випуску передньої опори у разі відмови гідросистеми № 2 шляхом ручного відкриття замку прибраного положення стійки.
Стійка випускається і стає на замок випущеного положення під дією власної ваги і набігаючого потоку .
14.2 ОПИС
Система механічного випуску ПОШ показана на мал. 1.
Система включає руків'я 1 і привід, що сполучає її з гойдалкою 7 замку прибраного положення.
Руків'я зафіксоване клямкою і за допомогою троса 2 сполучена з качалкою 3, закріпленою на опорній плиті 8. Тяга 4 одним кінцем кріпиться до качалки 3, а іншим сполучена з качалкою 7 замку прибраного положення. Кут повороту качалки 3 обмежується пружиною 5 з упором 6.
14.3 РОБОТА
Для здійснення механічного випуску передньої опори необхідно расконтрить клямку і, расфіксировав руків'я 1, витягнути її вгору повністю. При цьому обертається качалка 3. Поворот качалки через тягу 4 передається качалці 7 замку прибраного положення, яка відкриває замок.
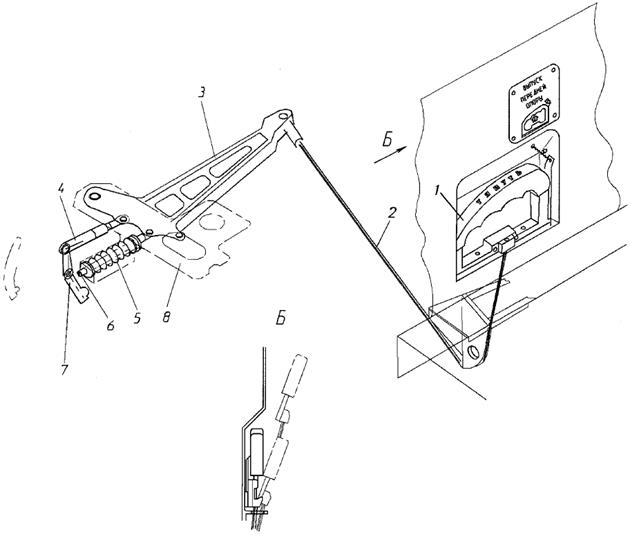
1 – руків`я
2 – трос
3 – качалка
4 – тяга
5 – пружина
6 – упор
7 – качалка замка прибранного положення
8 – опорна плита
Рис.1 Система механічного випуску ПОШ
15.СИСТЕМА УПРАВЛІННЯ РУЛЬОВИМ ПРИСТРОЄМ –
ОПИС І РОБОТА
15.1 ЗАГАЛЬНІ ВІДОМОСТІ
Система управління рульовим пристроєм призначена для управління рульовим облаштуванням стійки передньої опори.
Система - гидромеханічна, слідкуюча.
Система забезпечує:
- слідкуюче управління рульовим пристроєм при рулюванні, розгоні і пробігу;
- роботу рульового пристрою в режимі "Орієнтування";
- демпфування спільне з рульовим облаштуванням коливань передньої опори.
За відсутності електроживлення або гідроживлення система автоматично переходить в режим "Орієнтування". В цьому випадку передня опора йде за зовнішнім навантаженням.
Система управління рульовим пристроєм оснащена блокуванням, передньої опори, що відключає її при відриві, від землі; при цьому система переходить в режим "Орієнтування", центруючий механізм встановлює колеса в нейтральне положення. Зняття блокування відбувається при обтисканні амортизатора передньої опори.
Якщо при прибиранні шасі система не відключилася, то в зливній порожнині замку випущеного положення ПОШ є присутнім тиск, який робить неможливим прибирання передньої опори.
Гідроживлення системи здійснюється від ГС № 2 літака. За відсутності тиску в ГС № 2 система автоматично перемикається на роботу від резервної насосної станції НС-140-2Н.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.