Дифференцируя по обобщенной координате уравнения (2.25) и (2.26), определяем аналоги ускорений центров масс звеньев 2 и 3 в проекциях на оси координат:
![]() ,
(2.33)
,
(2.33)
![]()
![]()
![]()
![]() ,
(2.34)
,
(2.34)
![]()
Результаты расчета аналогов ускорений для двенадцати положений приведены в таблице 2.5.
Аналоги ускорений для двенадцати положений механизма
|
Номер положения |
j2" |
j3" |
l9",м |
l7", м |
S2x ", м |
S2y", м |
S3x", м |
S3y", м |
|
Нач. |
0,291207 |
0,31352 |
-0,04774 |
0,133124 |
-0,04987 |
-0,22428 |
-0,05172 |
-0,13463 |
|
Рас. |
0,344328 |
0,18484 |
-0,01623 |
0,069106 |
0,026894 |
-0,16023 |
-0,01985 |
-0,08307 |
|
2 |
0,376995 |
0,04729 |
0,011391 |
0,007876 |
0,090521 |
-0,06906 |
0,011357 |
-0,02518 |
|
3 |
0,399096 |
-0,0579 |
0,016691 |
-0,02744 |
0,110242 |
0,025413 |
0,019721 |
0,024139 |
|
4 |
0,345413 |
-0,10412 |
0,009547 |
-0,0398 |
0,089492 |
0,093588 |
0,011787 |
0,04735 |
|
5 |
0,345413 |
-0,1041 |
0,009547 |
-0,0398 |
0,089492 |
0,093588 |
0,011787 |
0,04735 |
|
6 |
0,048717 |
-0,0966 |
-0,0013 |
-0,03576 |
-0,00306 |
0,134742 |
-0,00162 |
0,044409 |
|
Кон. |
-0,15451 |
-0,1162 |
-0,00242 |
-0,04313 |
-0,04957 |
0,130765 |
-0,003 |
0,053375 |
|
7 |
-0,47695 |
-0,1824 |
0,001444 |
-0,06728 |
-0,07748 |
0,127456 |
0,001787 |
0,084018 |
|
8 |
-0,84526 |
-0,2272 |
0,021255 |
-0,08717 |
-0,06466 |
0,10097 |
0,026204 |
0,103207 |
|
9 |
-0,56764 |
0,0299 |
0,029023 |
-0,00549 |
-0,04602 |
-0,06681 |
0,032012 |
-0,02037 |
|
10 |
-0,43211 |
0,10587 |
0,02141 |
0,022468 |
-0,05077 |
-0,109 |
0,021894 |
-0,05495 |
|
11 |
0,015188 |
0,3067 |
-0,02262 |
0,112448 |
-0,07522 |
-0,21569 |
-0,02862 |
-0,13908 |
|
12 |
0,291207 |
0,313 |
-0,04774 |
0,133124 |
-0,04987 |
-0,22428 |
-0,05172 |
-0,13463 |
2.4. Построение планов скоростей и ускорений.
Планом скоростей (ускорений) называется рисунок, на котором в масштабе изображены, векторы, равные по модулю и направлению скоростям (ускорениям) различных точек звеньев механизма в данный момент времени. План скоростей (ускорений), построенный для исследуемого положения механизма, является совокупностью нескольких плановкоростей (ускорений) отдельных точек звеньев, у которых полюса планов являются общей точкой – полюсом пласкоростей (ускорений) механизма.
2.4.1. Определение аналогов скоростей исследуемого механизма графическим методом.
Решение этой задачи графическим методом основано на построении плана скоростей, например, для второго положения механизма при j1 = 120,92°. Так как аналоги скоростей и ускорений не зависят от закона изменения обобщенной координаты, принимаем w1 = 1 рад/с.
План скоростей механизма строим в следующем порядке:
1. Находим скорость точки А. Так как точка А совершает только вращательное движение, то её скорость будет:
![]() м/с.
м/с.
2. Из полюса плана скоростей рv – откладываем отрезок рvа = 50 мм, изображающий вектор скорости точки А (рис. 2.4).
3. Подсчитываем масштабный коэффициент скоростей:
 .
.
4. Для определения скорости точки В раскладываем плоско-параллельное движение звена 2 на переносное (поступательное) вместе с точкой А и относительное (вращательное) вокруг точки А. С другой стороны, точка В находится в относительном движении вокруг неподвижной точки С. Тогда получим:
![]() ,
(2.35)
,
(2.35)
Уравнение (2.35) решаем графически. Через точку а проводим линию, перпендикулярную ВА, а через полюс рv – линию, перпендикулярную ВС, до их пересечения в точке b. Векторы
рvb и ba изображают искомые скорости VB и VBA.
5. Скорость точки D ,которая является общей для звеньев 4 и 5, находим, раскладывая движение точки D на переносное (вращательное) вместе с точкой В и относительное (поступательное) по отношению к точке В. В абсолютном движении точка D перемещается вдоль оси Y-Y. Тогда получим
![]()
Скорость ![]() определяем используя теорему подобия:
определяем используя теорему подобия:
 ;
; 
От полюса pv откладываем ![]() . Через точку d1 проводим линию, параллельную BD, а через полюс pv – линию, параллельную Y-Y, до пересечения
их в точке D. Вектор pd изображает скорость точки D, а вектор d1d – скорость точки D относительно B.
. Через точку d1 проводим линию, параллельную BD, а через полюс pv – линию, параллельную Y-Y, до пересечения
их в точке D. Вектор pd изображает скорость точки D, а вектор d1d – скорость точки D относительно B.
6. Положение точек S2 и S3 на плане скоростей находим, воспользовавшись теоремой подобия:
 ,
,
 .
.
7. Из плана скоростей находим:
 .
.
 ,
,
 ,
,
 ,
,
 ,
,
 ,
,
Определяем аналоги линейных и угловых скоростей:
 ,
,
 .
.
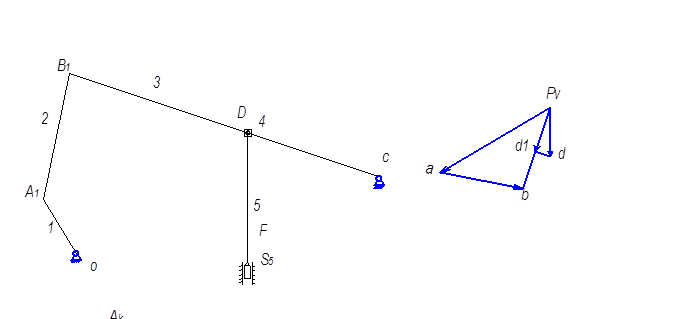
Рис.2.4 План скоростей.
В таблице 2.2.6 приведены значения аналогов скоростей, полученные графическим и аналитическим методами.
Таблица 2.6
Результаты расчетов аналогов скоростей
|
Величина |
j2' |
j3' |
l9', м |
l7', м |
|
Графически |
0.330 |
0,175 |
0,017 |
0,0703 |
|
Аналитически |
0,344 |
0,18 |
0,016 |
0,069 |
|
Отклонение, % |
4% |
2.8% |
5% |
1.8% |
2.4.2. Определение аналогов ускорений исследуемого механизма графическим методом.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.