Подставляем заданные значения в формулу(3.1) получим:
ω1=![]()
VA=VAO=ω1∙lOA=29,32∙0,058=1,7м/с
Масштабный коэффициент плана скоростей μv равен:
μv = ![]() (3.2)
(3.2)
VA − модуль скорости т.A;
|pa| − произвольно выбранный отрезок, изображающий на плане скоростей вектор скорости т. A.
Примем ![]() , тогда по выражению (3.2)
получим:
, тогда по выражению (3.2)
получим:
μv=
Из произвольно выбранной точки ![]() (полюс
скоростей) откладываем перпендикуляр к кривошипу 1, на котором будет находиться
вектор скорости т.А. Затем от полюса откладываем отрезок равный |pa|=60мм
и получаем точку а. Вектор
(полюс
скоростей) откладываем перпендикуляр к кривошипу 1, на котором будет находиться
вектор скорости т.А. Затем от полюса откладываем отрезок равный |pa|=60мм
и получаем точку а. Вектор ![]() A перпендикулярен кривошипу ОА и направлен в сторону его
вращения.
A перпендикулярен кривошипу ОА и направлен в сторону его
вращения.
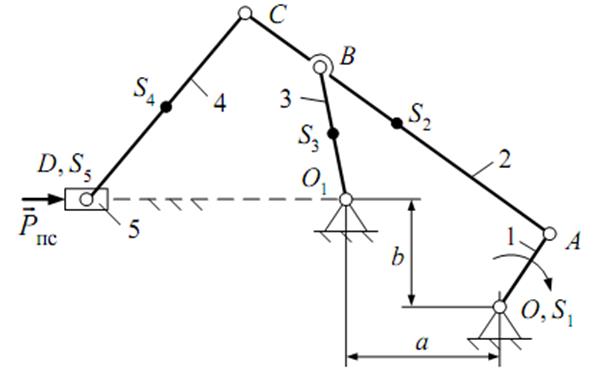
Рассмотрим точку В:
Вектор скорости т.B, принадлежащей шатуну 2, представляет собой геометрическую сумму вектора скорости т.А и вектора скорости относительного вращательного движения т.B вокруг т.А:
![]() B=
B=![]() A+
A+![]() (3.3)
(3.3)
В то же время т.B принадлежит и коромыслу 3. Коромысло 3 совершает только вращательное движение вокруг т.О1 принадлежащей стойке и траекторией движения является кривая 2-го порядка, т. е окружность.
![]() B=
B=![]() A+
A+ (3.4)
(3.4)
Из точки a
проводим линию, перпендикулярную шатуну АВ, а из полюса прямую,
перпендикулярную прямой BO1.
На пересечении этих двух перпендикуляров мы получим точку bи
откладываем вектора скоростей ![]() и
и ![]() .
.
Рассмотрим точку С:
Вектор скорости точки С, найдем при помощи теоремы подобия:
 (3.5)
(3.5)
Из формулы (3.5) выразим длину отрезка ![]() отложим его из точки b, мы получим точку С и вектор скорости
отложим его из точки b, мы получим точку С и вектор скорости ![]() .
.
Рассмотрим точку D:
Вектор скорости т.D, принадлежащей шатуну 4, представляет собой геометрическую сумму вектора скорости т.Cи вектора скорости относительного вращательного движения т.Dвокруг т.C:
![]() D=
D=![]() C+
C+![]() (3.6)
(3.6)
В то же время т.Dпринадлежит и ползуну 5. Ползун 5 совершает только прямолинейные поступательное движение вдоль направляющей (прямая DO1), следовательно, линия действия вектора скорости т.Dпроходит параллельно прямой DO1:
![]() D||DO1(3.7)
D||DO1(3.7)
Из точки c
проводим линию, перпендикулярную шатуну CD, а из
полюса прямую, параллельную прямой DO1. На
пересечении получим точку d и
получим векторы скоростей ![]() D и
D и ![]() CD.
CD.
Определим значения скоростей характерных точек.
Замерив
на плане скоростей для четвертого положения длины отрезков |pb|, |ab|, |pd|,|cd|, |bc| и ![]() получим:
получим:
![]()
![]()
![]()
![]()
![]()
![]()
Используя найденные величины отрезков, определим модули соответствующих скоростей для четвертого положения механизма.
![]() =|pb| ∙ μυ = 51,27 ∙ 0,028
= 1,44 м/с
=|pb| ∙ μυ = 51,27 ∙ 0,028
= 1,44 м/с
VBA=|ab| ∙ μυ = 16,07 ∙ 0,028 = 0,45 м/с
VCB=|bc| ∙ μυ = 2,41 ∙ 0,028 = 0,07 м/с
VDC=|cd| ∙ μυ = 50,45 ∙ 0,028 = 1,41 м/с
VD=|pd| ∙ μυ = 4,46 ∙ 0,028 = 0,13 м/с
VC=|pc| ∙ μυ = 50,28 ∙ 0,028 = 1,41 м/с
Таблица 5.
|
Номер положения механизма |
Скорости
точек, |
Угловые
скорости звеньев, |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
1,7 |
1,09 |
0,92 |
1,04 |
0,14 |
0,3 |
0,9 |
29,32 |
3,95 |
10,38 |
2,77 |
|
2 |
1,7 |
1,58 |
0,41 |
1,58 |
0,06 |
0,35 |
1,45 |
29,32 |
1,76 |
15,05 |
4,46 |
|
3 |
1,7 |
1,68 |
0,1 |
1,68 |
0 |
0,09 |
1,66 |
29,32 |
0,43 |
16 |
5,11 |
|
4 |
1,7 |
1,44 |
0,45 |
1,41 |
0,07 |
0,12 |
1,41 |
29,32 |
1,93 |
13,71 |
4,34 |
|
5 |
1,7 |
0,81 |
1,09 |
0,74 |
0,15 |
0,07 |
0,74 |
29,32 |
4,68 |
5,4 |
2,28 |
|
6 |
1,7 |
0 |
1,68 |
0,25 |
0,25 |
0,25 |
0 |
29,32 |
7,21 |
0 |
0 |
|
7 |
1,7 |
0,67 |
1,77 |
0,8 |
0,27 |
0,45 |
0,68 |
29,32 |
7,6 |
6,38 |
2,09 |
|
8 |
1,7 |
1,19 |
1,26 |
1,22 |
0,19 |
0,39 |
1,18 |
29,32 |
5,41 |
11,3 |
3,63 |
|
9 |
1,7 |
1,64 |
0,14 |
1,64 |
0,02 |
0,03 |
1,64 |
29,32 |
0,6 |
15,62 |
5,05 |
|
10 |
1,7 |
1,86 |
1,31 |
1,96 |
0,2 |
0,76 |
1,69 |
29,32 |
5,62 |
17,71 |
5,2 |
|
11 |
1,7 |
1,28 |
2,1 |
1,49 |
0,32 |
0,87 |
0,97 |
29,32 |
9,01 |
12,19 |
2,98 |
|
12,0 |
1,7 |
0,04 |
1,61 |
1,91 |
0,24 |
0,25 |
0,9 |
29,32 |
6,91 |
0,38 |
2,77 |
|
13 |
1,7 |
0,04 |
1,61 |
1,91 |
0,24 |
0,25 |
0,9 |
29,32 |
6,91 |
0,38 |
2,77 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.