Из анализа данных таблицы 2 следует, что исследуемый механизм состоит из семи кинематических пар: пяти пар пятого класса, одной пары четвертого класса и одной пары третьего класса. Следовательно, их коэффициенты равны: p5=5, p4=1, p3=1, p2=0, p1=0.
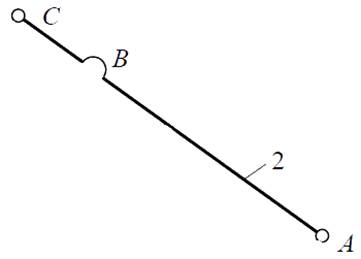
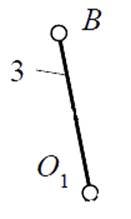
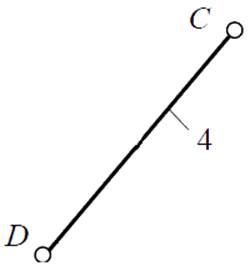
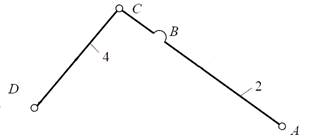
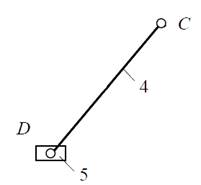
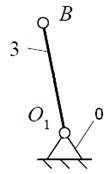
Из анализа таблиц 1 и 2 следует, что данный механизм образует одну простую незамкнутую кинематическую цепь (т.к каждое звено которой входит в состав не более двух кинематических пар, т. е. содержит только одно или два вершины звена и в которой хотя бы одно звено имеет свободный элемент, не взаимодействующий с другими звеньями и не образующий с ними кинематических пар, в данном случае это схват 7) и содержит в своей структуре один элемент стойки, представленный звеном 0.
Полученные значения подставляем в формулу (1.0), получим:
W=6∙7-5∙5-4∙1-3∙1-2∙0-1∙0=42-25-4-3-0-0=10
Результат означает, что для однозначного определения взаимного расположения звеньев данного механизма трехмерного пространства при не замкнутой кинематической цепи, необходимо 10 обобщенных координат.
Определение маневренности:
Для определения маневренности механизма необходимо, что бы кинематическая цепь была замкнутой. Для этого схват изображаем как неподвижное звено. Кинематическая цепь становиться замкнутой и поэтому число подвижных звеньев уменьшается на (n-1), тогда n=6.
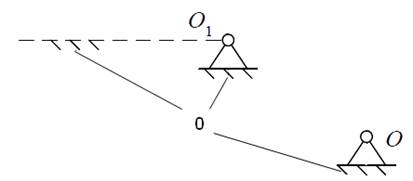
На (рис.2) изображена структурная схема замкнутого пространственного механизма.
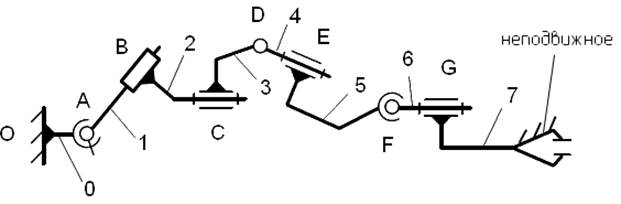 Рис.2
Рис.2
Рис. 2
m=6∙n - 5∙p5 - 4∙p4- 3 p3- 2 p2- p1 (1.1)
m– Маневренность манипулятора.
Подставив известные данные в формулу (1.1), получим:
m=6∙6 - 5∙5 - 4∙1 - 3∙1 - 2∙0 - 1∙0=4
Результат означает, что для однозначного описание взаимного расположения звеньев данного механизма в трехмерном пространстве при замкнутой кинематической цепи, достаточно 4-х обобщенные координат.
Проверка:
m=W-6=10-6=4
m ≥ 4
Условие проверки сходиться, так как значения маневренности должны быть m ≥ 1
Вывод: из рассмотренных ситуаций следует, что обеспечение работоспособности манипулятора возможно только при выполнении следующего условия: m ≥ 4
5.2 Определения подвижности (степени подвижности) и анализ состава структуры сложного плоского рычажного механизма.
Определения подвижности:
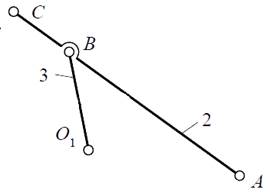
На рисунке 3 изображена схема сложного плоского рычажного механизма:
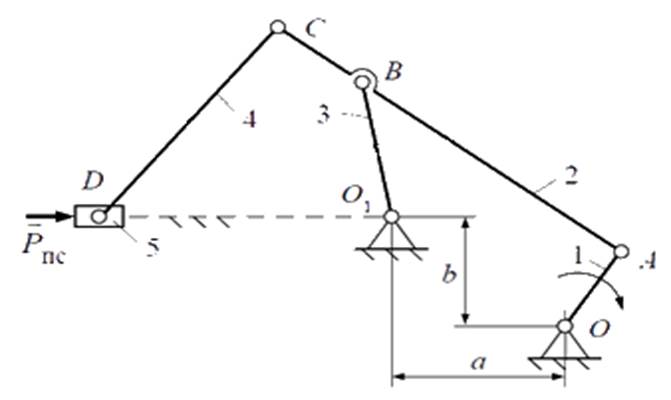 Рис.
3
Рис.
3
Для определения подвижности сложного плоского рычажного механизма воспользуемся структурной формулой Чебышева:
W=3∙n-2p5-p4 (1.2)
Для определения величины коэффициента n проанализируем структурную схему механизма (рис.3), результат представим в виде таблицы:
Таблица 3.
|
№ звена/ количество вершин |
Схема |
Название звена/вид движения |
|
1/2 |
|
Кривошип/вращательное |
|
2/2 |
|
Шатун/сложное |
|
3/2 |
|
Коромысло/ вращательное |
|
4/2 |
|
Шатун/сложное |
|
5/2 |
|
Ползун/поступательное |
|
0 |
|
Стойка/неподвижное |
Проанализировав структурную схему механизма, из таблицы 3 видно, что механизм состоит из шести звеньев: 1-кривошипа, 2-шатуна, 3-коромысла, 4-шатуна, 5-ползуна, 0-стойки. При этом звенья 1-5 являются подвижными звеньями, а стойка 0-неподвижным звеном, она представлена в составе структурной схемы направляющей ползуна 5 и двумя шарнирно-неподвижными опорами О и О1. Следовательно, n=5 .
Для определения значений коэффициентов p4 и p5 найдем все кинематические пары, входящие в состав рассматриваемой кинематической цепи. Результаты исследования заносим в таблицу 4:
Таблица 4.
|
№ звеньев/ движение |
Схема |
Класс/ подвижность |
Вид контакта/ замыкание |
|
0 – 1/ вращательная |
|
5/1 |
Поверхность (низшая)/ геометрическое |
|
1 – 2/ вращательная |
|
5/1 |
Поверхность (низшая)/ геометрическое |
|
2 – 3/ вращательная |
|
5/1 |
Поверхность (низшая)/ геометрическое |
|
2 – 4/ сложное |
|
5/1 |
Поверхность (низшая)/ геометрическое |
|
4 – 5/ вращательная |
|
5/1 |
Поверхность (низшая)/ геометрическое |
|
3 – 0/ вращательная |
|
5/1 |
Поверхность (низшая)/ геометрическое |
|
5 – 0/ поступательная |
|
5/1 |
Поверхность (низшая)/ геометрическое |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.