Привод перемещения в полношаговом режиме требует 6625 импульсов на один метр, в полушаговом – 13250. Соответственно, скорость перемещения каретки может быть программно задана любой в целое число раз меньшей 151 мм/сек. Максимальная реализуемая скорость перемещения детали зависит от суммарного веса детали и каретки. Это ограничение не приводит к затруднениям при выборе режимов напыления, так как крупные детали требуют меньших скоростей перемещения.
Стабильность скоростей вращения и перемещения обеспечивается применением шаговых двигателей и компьютерным управлением, плавность хода – применением резиновых ремней.
Напряжение, подаваемое на шаговые двигатели, не превышает 24 в, а драйверы снабжены защитой от перегрузок и короткого замыкания.
Ток через фазы включенного шагового двигателя протекает всегда, независимо от того, вращается ротор или нет. Рассеиваемая в обмотках двигателя мощность составляет 16 Вт, а рабочая температура корпуса двигателя – 40-50°С.
Вал шагового двигателя конический, шпонка отсутствует. Сцепление вала с муфтой осуществляется за счет трения, поэтому втулка муфты «сажается» на вал по горяче-прессовой посадке с нагревом муфты до 100-150 градусов. Самораспрессовка муфты является наиболее вероятной причиной отказа привода. Вал двигателя тонкий, поэтому при монтаже привода следует избегать приложения ощутимых усилий.
Применяя метод сечений, нетрудно заметить, что в сечении проволоки возникают небольшие по величине изгибающий момент и продольная сила, а также поперечная сила Q=F и крутящий момент Tk=FD/2.По величине касательные напряжения сдвига обычно составляют 2…5% от напряжения кручения, а остальные виды деформации учитываются в поправочном коэффициенте.
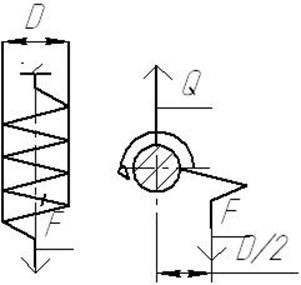
Рисунок 3.1 – Схема пружины
Введем следующие обозначения:
D – средний диаметр витка пружины;
d – диаметр сечения проволоки пружины;
C=D/d – индекс пружины, принимаем C=9:
n – общее количество витков пружины;
m – число рабочих витков, в данном случае m = n так как пружина работает на растяжение.
Условие прочности пружины с учетом поправочного коэффициента будет иметь вид по формуле [23]
 , (3.4.1)
, (3.4.1)
Где F – продольная сила, Н;
![]() - максимально допустимое значение напряжений в пружине, Н;
- максимально допустимое значение напряжений в пружине, Н;
Значение поправочного коэффициента определяется по эмпирической формуле [23]
 (3.4.2)
(3.4.2)
Где c – индекс пружины, с=9;
Продольная сила будет складываться F=W+Fдгн;
Где W - Сопротивление передвижению тележки, Н [24]
 , (3.4.3)
, (3.4.3)
где g – ускорение свободного падения, g = 9,81 м/с 2;
Qгр – грузоподъемность, Qгр = 12кг;
Qт – масса тележки, Qт = 80 кг;
μ – коэффициент трения качения колеса, μ = 0,3…1 мм;
f– коэффициент трения в опоре, f= 0,01…0,02, для подшипников скольжения;
d – посадочный диаметр колеса, d = 20 мм;
DК– диаметр колеса, DК = 80 мм;
КР – коэффициент сопротивления от трения реборд колеса и торцов втулок, КР = 1,4…3,0.
 = 27,1 Н;
= 27,1 Н;
![]() – сила с которой действует заряд при напылении;
– сила с которой действует заряд при напылении;
![]() (3.4.4)
(3.4.4)
где m– масса заряда, m=1г;
a– ускорение заряда, a=600…1000 м/с2
![]() ;
;
Тогда продольная сила F будет равна:
F=27,1+1=28,1 Н;
Из формулы (3.4.1) находим диаметр сечения проволоки пружины:
 , (3.4.5)
, (3.4.5)
где F – продольная сила, F=28,1 Н;
![]() - максимально допустимое значение напряжений в пружине,
- максимально допустимое значение напряжений в пружине,![]() =45 Н;
=45 Н;
 =4,63 мм;
=4,63 мм;
По справочнику выбираем стандартную пружину d=4,75 мм;
Тогда диаметр пружины будет равен:
![]() , где d – диаметр проволоки пружины, d=4,75 мм;
, где d – диаметр проволоки пружины, d=4,75 мм;
c – индекс пружины, c=9;
![]() мм;
мм;
Сила при максимальной деформации Fmax :
 , где F – продольная сила, F=28,1 Н;
, где F – продольная сила, F=28,1 Н;
γ – относительный инерционный зазор, принимается из справочника γ=0,16
 =33,5 Н;
=33,5 Н;
Жесткость пружины С, Н/м;
 ,
,
Где F – продольная сила, F=28,1Н;
λ – деформация пружины, λ =10·10-3 м;
 Н/м;
Н/м;
Максимальная деформация λmax м;
 ;
;
Расчетное касательное напряжение τ, Н;
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.