Рис. 1.2. Задание регулятору на изменение частоты вращения ротора
nTPj – задание регулятору; nj – реализованная частота вращения ротора
(гидроагрегат № 8 с контроллером EMERSON, пуск 23.06.2007 г.)
Рис. 1.3. Задание регулятору на изменение активной мощности
(гидроагрегат № 19, пуск 08.12.2006 г.)
Такие функции содержат разрывы непрерывности производных (скоростей и ускорений), а система управления по этим же зависимостям стремится формировать и управляемые переменные, создавая скачкообразные силы инерции. В результате в переходных режимах работы гидроагрегатов возникают гидроудары.
Поддержание мощности гидроагрегата равной ее заданному значению ведется формирователем, показанным на рисунке 1.4. Поддержание мощности ведется вне зависимости от колебаний напора или его динамического изменения в процессе регулирования.
Формирователь обеспечивает ПИ закон регулирования мощности. Его автоматическое включение происходит при переходе в режим «Мощность».
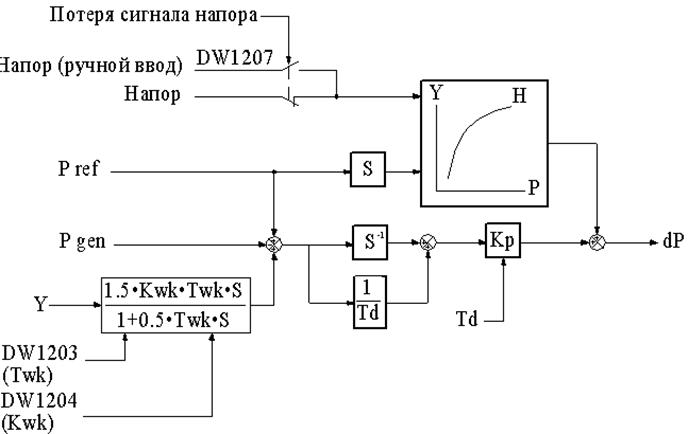
Рис. 1.4. ПИ формирователь регулирования мощности
На рисунке 1.4 приняты следующие обозначения: Kwk – коэффициент пропорциональной составляющей компенсации гидроудара; Twk = Tw/2; Tw – постоянная времени водовода; Pgen – активная мощность генератора; Н – напор; Y – положение сервомотора направляющего аппарата.
В формирователь включены элементы компенсации влияния гидроудара и канала прямого управления. Компенсация влияния гидроудара, возникающего в процессе движения сервомотора, обеспечивает качественный динамический процесс регулирования мощности, а применение прямого канала управления с зависимостью Y = (P,H) быструю реакцию системы на управляющее воздействие.
Сигнал приращения dP поступает в сумматор приращений, где суммируется с сигналом от формирователя закона стабилизации частоты вращения.
В режиме генерирования мощности ограничение открытия устанавливается в зависимости от напора и ограничивает мощность агрегата в соответствии с эксплуатационной характеристикой.
Комбинаторная зависимость согласует угол установки лопастей РК с углом поворота лопаток НА при разных значениях напора воды и должна обеспечивать максимальное значение к.п.д. гидроагрегата. Каждая точка комбинаторной зависимости была определена в установившемся режиме работы экспериментальной установки при фиксированных значениях напора воды и положения лопаток НА модели рабочего колеса с последующим пересчетом на реальную турбину с помощью теории подобия.
Формирование комбинаторной зависимости происходит по следующим функциям:
![]() (1.1)
(1.1)
![]() (1.2)
(1.2)
![]() (1.3)
(1.3)
где: φрк – угол разворота лопастей рабочего колеса (%); а0 – открытие лопаток направляющего аппарата (мм); Н – напор (м); Yна – положение сервомотора направляющего аппарата; Yрк – положение сервомотора рабочего колеса.
В программе контроллера данные функции описаны наборами точек соответствующей характеристики с последующей линейной интерполяцией. Значения наборов точек являются постоянными величинами и не могут быть изменены с пульта оператора.
При отсутствии датчика по напору, величина действующего напора принимается равной переменной DW1207.
При работе агрегата осуществляется контроль допустимой величины рассогласования (±Δφоп) между заданным разворотом лопастей в соответствии с комбинаторной зависимостью и положением сервомотора рабочего колеса, а также величины скорости отработки задания (±ΔVоп). При выходе контролируемых величин за допустимые пределы формируется сигнал о нарушении комбинаторной зависимости.
Величина нижнего ограничения – зависимая от действующего напора величина открытия, при которой частота вращения гидроагрегата на холостом ходу равняется нижнему допустимому пределу по условиям синхронизации.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.