2. Алгоритм обучения модели гидроагрегата, позволяющий определять текущие оценки параметров, переменных состояния и возмущающих воздействий с помощью самонастраивающегося многомерного ПИ-регулятора переменных состояния;
3. Алгоритм коррекции комбинаторной зависимости, формирующий в реальных условиях работы гидроагрегата углы установки лопастей РК, обеспечивающие допустимую погрешность регулирования активной мощности при минимальном расходе воды через турбину;
4. Система адаптивного управления активной мощностью гидроагрегата с поворотно-лопастной турбиной, которая формирует управляющие воздействия на электрогидравлические преобразователи гидравлических двигателей механизмов поворота лопастей РК и лопаток НА турбины с помощью самонастраивающегося многомерного ПИД-регулятора и обеспечивает допустимую погрешность регулирования активной мощности гидроагрегата при минимальном расходе воды через турбину;
Апробация работы. Основные результаты диссертации докладывались:
на XII Международном конгрессе двигателестроителей (пос. Рыбачье, Крым, 2007); на научно-технической конференции ВПИ (филиал) ВолгГТУ (Волжский, 2008);
на …
Публикации. По теме диссертации опубликовано … научных работ, в том числе … статей в изданиях, рекомендованных ВАК Минобразования и науки РФ; … патентов на изобретение и … статей в других изданиях.
В совместных публикациях соискателем выполнено следующее. В статье […] разработан …. В работах […], […] разработаны алгоритмы ….
Структура и объем диссертации. Диссертация состоит из введения, 4 глав, заключения и приложения, изложенных на … страницах. Она содержит … рисунков и список использованных источников из … наименований.
В первой главе выполнен анализ ...(аннотация глав диссертации)
Штатная САУ содержит ПИД-реулятор частоты вращения ротора и ПИ-регулятор активной мощности гидроагрегата с постоянными параметрами настройки регуляторов. Управление осуществляют поворотом лопаток направляющего аппарата (НА) и лопастей рабочего колеса (РК) турбины с применением электронного комбинатора.
Электронный комбинатор формирует требуемое значение угла установки лопастей РК по результатам измерений напора воды и угла поворота лопаток НА с помощью статической характеристики (комбинаторной зависимости), полученной экспериментальными исследованиями моделей рабочих колес поворотно-лопастных гидротурбин.
Настройка параметров регуляторов осуществляют с использованием линейных моделей процессов, происходящих в объекте управления (ОУ) и заданных передаточными функциями с постоянными параметрами. Эти модели получены линеаризацией исходных нелинейных уравнений анализируемых процессов в окрестности установившихся режимов работы ОУ по каждому каналу управления.
Задание мощности в существующей системе формирует задатчик мощности, показанный на рисунке 1.1, предназначенный для изменения «Выше – ниже» задания мощности (при наличии сигнала активной мощности генератора) или задания открытия (при отсутствии сигнала активной мощности генератора), а также для установки задания в соответствии с сигналом группового управления Pjc.
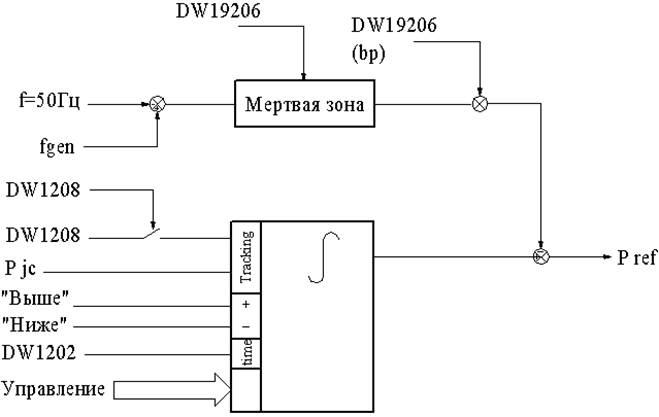
Рис. 1.1. Задатчик мощности
Установка задания осуществляется с выбранной скоростью изменения, определяемой параметром DW1202.
В состав функций задатчика входят формирование статизма частота/мощность и набор технологического минимума нагрузки (ВЦ1208 = 1). При работе в режиме «мощность» и выходе частоты за пределы величины «мертвой зоны» (DW19206) вводится регулирование по частоте со статизмом (DW19202) и увеличенной постоянной времени интегрирования (DW19205).
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.