|
|
(0.1) |
Результат обучения модели привода лопаток НА для ГА №8 при действующем значении напора 25 м и заданном значении мощности 110 МВт приведены на рисунках Ошибка! Ошибка связи. и .
Рисунок 5 результат обучения модели привода лопаток НА
uN – задание приводу лопаток НА (град);
yHA(t) – положение привода лопаток НА(град).
Рисунок 6 - Погрешность обучения модели привода лопаток НА
Максимальная погрешность (динамическая) обученной модели в процессе пуска составляет 8,45 %, но в установившемся режиме работы она значительно уменьшается:
1 Среднеквадратичное отклонение погрешности модели привода лопаток НА в установившемся режиме работы ГА:
|
|
(0.2) |
2 Статическая погрешность модели привода лопаток НА в установившемся режиме работы ГА:
|
|
(0.3) |
Результат обучения модели формирования мощности для ГА №8 при действующим значении напора 25 м и заданном значении мощности 110 МВт приведены на рисунках Ошибка! Ошибка связи. и Ошибка! Ошибка связи..
Рисунок 7 - Результаты определения активной мощности гидроагрегата № 8
![]() -
выходной сигнал модели ОУ;
-
выходной сигнал модели ОУ;
![]() -
выходной сигнал датчика активной мощности;
-
выходной сигнал датчика активной мощности;
tj – время с момента пуска (с).
Рисунок 8 - погрешность обученной модели ОУ
ΔМр – относительная погрешность обученной модели ОУ;
δМр – абсолютная погрешность обученной модели (МВт);
tj – время с момента пуска (с).
Максимальная погрешность обученной модели (динамическая) в процессе пуска составляет 3,372 МВт. Но как видно из рисунка Ошибка! Ошибка связи. в установившемся режиме (статическая) погрешность значительно меньше и составляет:
1 Среднеквадратичное отклонение погрешности обучения модели ОУ в установившемся режиме работы ГА:
|
|
(0.4) |
где Мтр – заданное значение мощности;
xM – значение активной мощности обученной модели;
t – время выхода в установившейся режим работы активной мощности ГА.
2 Среднее значение активной мощности обученной модели ОУ:
|
|
(0.5) |
3 Статическая погрешность предварительно обученной моделиОУ
|
|
(0.6) (0.7) |
Аналогичным образом были проанализированы все имеющиеся пуски гидроагрегатов №4, №8, №19. Статическая погрешность обученных моделей ОУ не превышает 0.5%. Динамическая погрешность обученных моделей ОУ не превышает 4 МВт (21%).
1 Концепция построения и развития технологического уровня автоматизированных систем управления гидроэлектростанциями Волжского каскада (1редакция). – Москва: РАО ЕЭС России, 2002. – 61с.
2 Правила технической эксплуатации электрических станций и сетей Российской Федерации. РД 34.20.501–03.Приказ Минтопэнерго России от 19.06.2003 № 49. Зарегистрировано в Минюсте России 20.06.2003, рег. № 4799
3 Общие технические требования к управляющим подсистемам агрегатного и станционного уровней АСУ ТП ГЭС: РД 153-34.0-35.519-98 (М.: СПО ОРГРЭС, 1999)
4 Гольцов А.С. Теория автоматического управления. Пособие - Орел: ВИПС, 1998. – 169 с.
5 Дипломное проектирование. Учебное пособие / Под ред. д.т.н. проф. В.И. Лачина. – Ростов н/Д: «Феникс», 2003. – 352с.
6 Адаптивная система управления процессом пуска гидротурбины ГЭС / А. С. Гольцов, А. В. Клименко, О. Л. Лытиков // Авиационно-космическая техника и технология, -2007. -№ 00. -С. 00-00.
7 общие технические требования к программно-техническим комплексам для АСУ ТП гидроэлектростанций.
8 Система группового регулирования активной мощности ОАО «Волжская ГЭС» технические требования.
9 Годовой отчет ОАО "Волжская ГЭС" по результатам работы за 2006 год.
10 Пояснительная записка к бухгалтерской отчетности ОАО «Волжская ГЭС» за 2006.
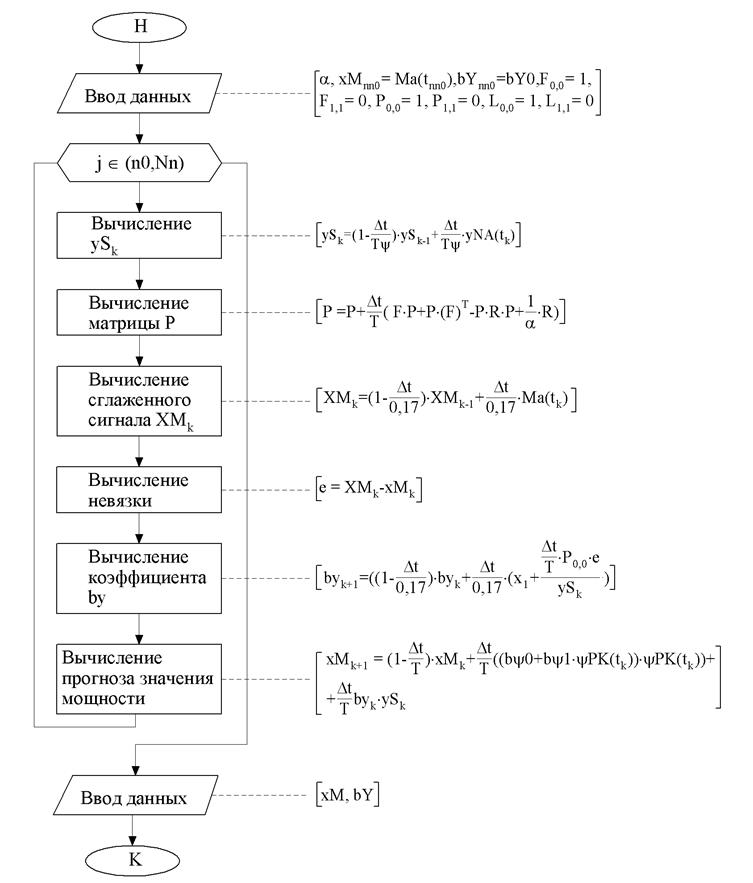
Алгоритм модели формирования мощности
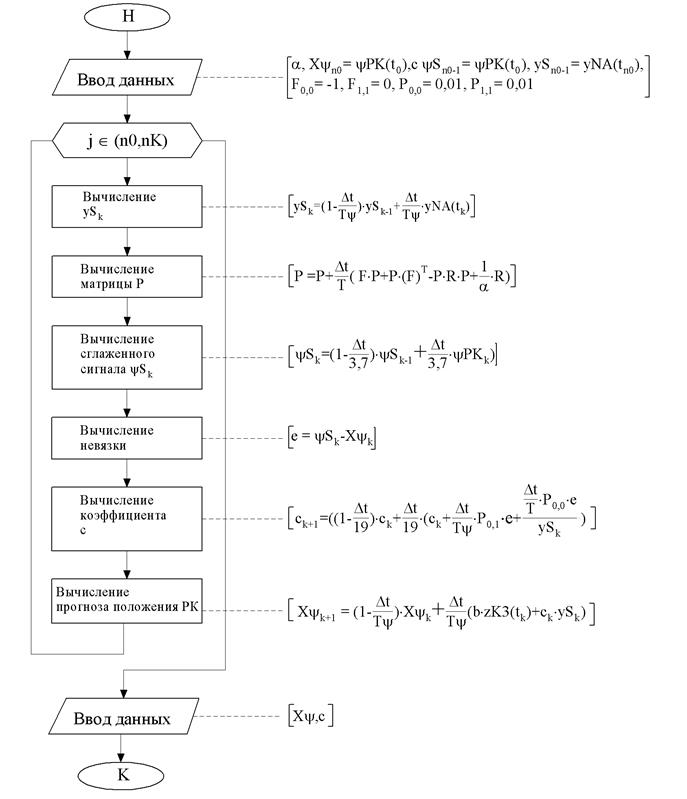
Алгоритм модели привода лопастей РК
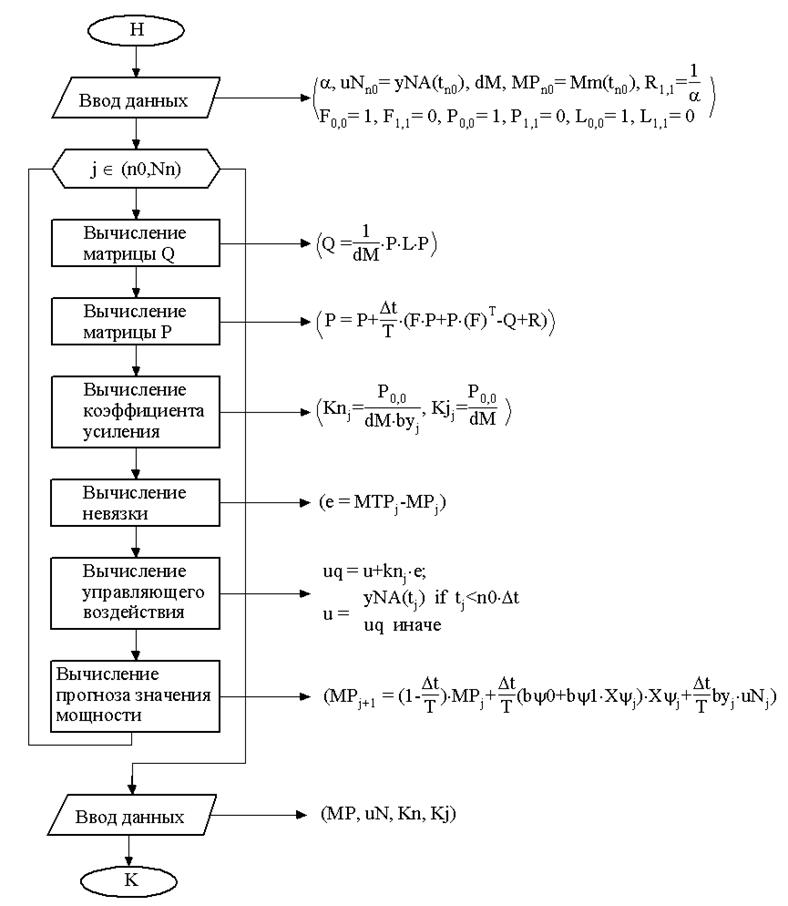
Алгоритм модели привода лопаток НА
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.
 %,
%, ,
,
 ;
;