WindowMaker является средой разработки приложений. При помощи данной программы формируется HMI системы управления (или его элемент), а также настраивается перечень функций, реализуемых конкретным приложением. WindowViewer является больше, чем просто «демонстратором» окон, как может следовать из его названия. Данная программа реализует сконфигурированные в WindowMaker функции и элементы HMI, осуществляет управление и обработку потоков данных, реализует написанные в редакторе сценариев программы, реализует функции безопасности и пр. В том числе WindowViewer может самостоятельно реализовывать простейшие алгоритмы и функции управления. Но, так как это не является его основным назначением, то для реализации управления объектом и моделирования систем применяются или отдельные программы, или подключаемые модули. При помощи WindowViewer можно назначить задания уставкам регуляторов, разрешить или запретить запуск того или иного технологического аппарата и пр. Но он не приспособлен для непосредственной реализации ПИД регулятора, или для приема необработанного сигнала от устройства периферии.
В данном проекте для реализации модели объекта управления и ПИД регуляторов применена программа InControl, входящая в пакет Factory Suite.
В первую очередь была создана модель объекта управления в непрерывных передаточных функциях. Структура модели составлена по принципу вход/выход. То есть, данная модель лишь отражает динамические и статические зависимости между входными и выходными величинами процесса. Для составления модели и оптимизации настроек ПИД регулятора использовалась программа MatLab. Предполагается, что между внутренними параметрами системы существуют статические и динамические связи. Созданная модель устойчива в статическом и динамическом состояниях. Однако при переходе к дискретной модели в InControl существенно ухудшились показатели качества регулирования системы, о чем свидетельствует рисунок В4.1. Ориентировочное время выхода в установившийся режим – около 20 минут. Для улучшения динамических показателей системы в InControl были уменьшены запаздывания сигналов внутри объекта. Модель объекта управления с регуляторами представлена на рисунке В4.1.
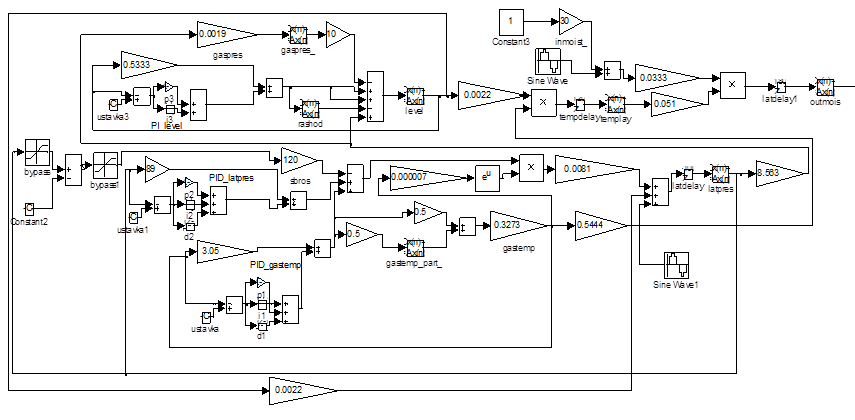
Рисунок В4.1 – Модель объекта управления с регуляторами, реализованная в MatLab
По данным, полученным в ходе моделирования и оптимизации настроек регулятора составлен текст программы в InControl. Значения параметров настроек ПИД регуляторов хранятся в специальных переменных. По умолчанию в проекте Dehidrator используются оптимальные настройки ПИД-регуляторов. Кроме того, в данном проекте скорость и диапазон изменения управляющих воздействий ограничены. Если вы создаете собственный проект, то Вам следует объявить следующие теги, присвоив им класс I/O real, широкие диапазоны изменения, и задав для них имена и начальные значения в соответствии с нижеприведенным:
i1 =6.2887
i2 =0.1126
i3 =3.5521
p1 =15.9488
p2 =89.0003
p3 =1.4061
d1 =5.6337
d2 =148.1161
Откройте Application Manager, запустите проект Dehidrator. После открытия окна WindowMaker нажмите кнопку Runtime! в правом верхнем углу окна. Ваш проект запустится в WindowViewer. см рисунок В4.2. Дополнительная информация по работе с WindowMaker и WindowViewer содержится в справочных пособиях по InTouch.
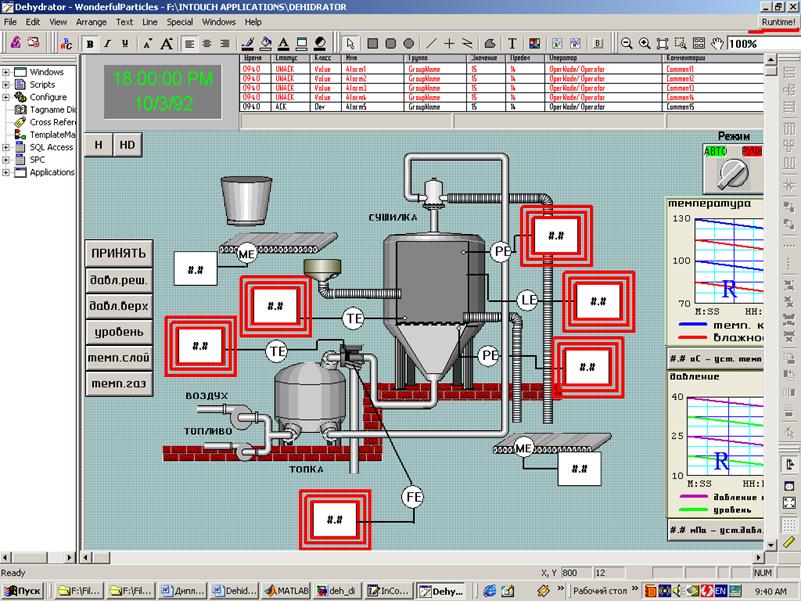
Рисунок В4.2 – Запуск проекта в WindowViewer
После этого запустите InControl – Project Manager (Проводник Проектов InControl). Для этого запустите файл InControl.exe, расположенные или на Вашем рабочем столе, или в меню Пуск, как показано на рисунке В4.3.
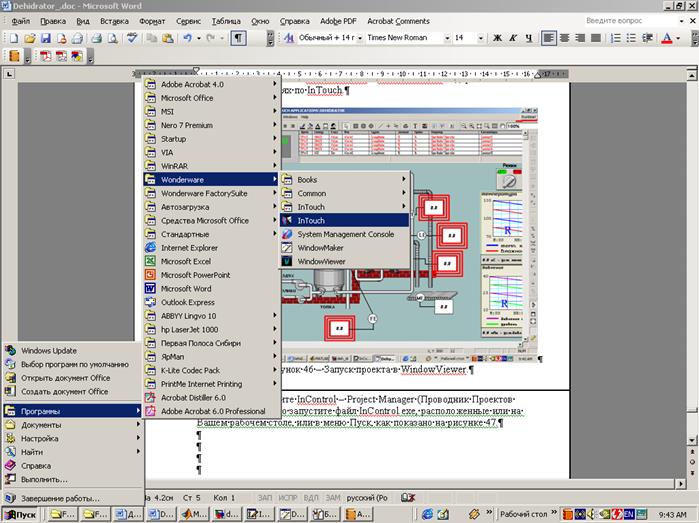
Рисунок В4.3 – Запуск InControl Project Manager
В открывшемся окне выберите «Сушка Силикагеля» и нажмите ввод, см рисунок В4.4.
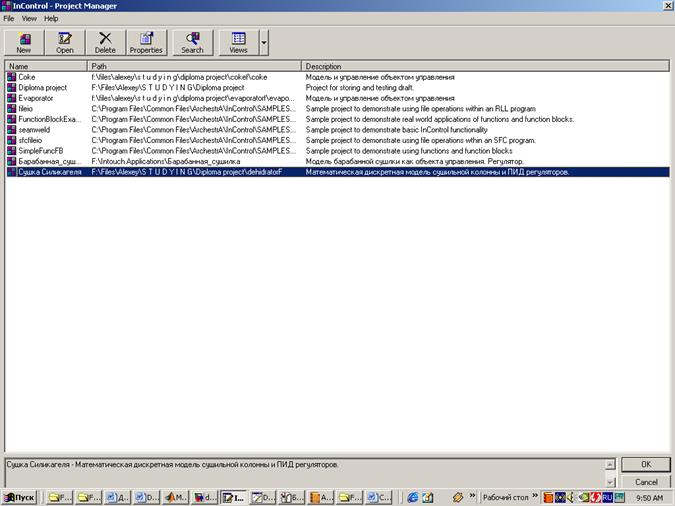
Рисунок В4.4 – Окно InControl – Project Manager
Откроется окно InControl Development Environment (среды разработки InControl). Нажмите кнопку Connect Runtime Engine, расположенную на панели инструментов, или выполните команду Runtime → Connect – см рисунок В4.5.
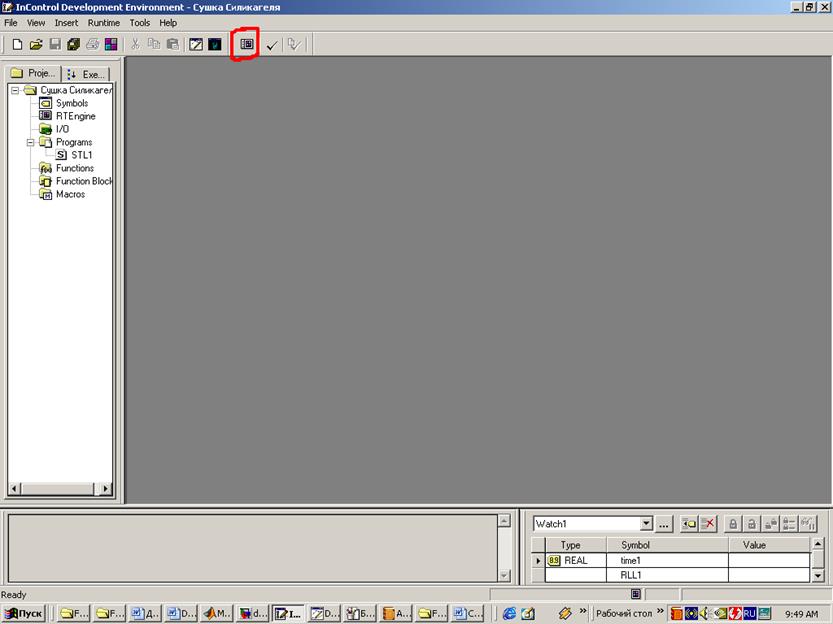
Рисунок В4.5 – окно InControl Development Environment (среды разработки)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.