Регулятор РДУК-2.Регулятор тиску універсальної конструкції Казанцева (рис. 1) є регулятором прямої дії, що працює автоматично, без застосування допоміжного джерела енергії, використовуючи енергію потоку газу, що дроселює. Для отримання вихідного тиску 0,005—0,6 кгс/см2 використовують пілот КН-2-00, а в межах 0,6—6,0 кгс/см2 — пілот КВ-2-00. РДУК-2 підтримує після себе постійний тиск з достатньою точністю при зміні витрат газу споживачем або при зміні вхідного тиску перед ним.
Конструктивно він складається з виконавчого вузла, що дроселює основний потік газу, пілота, який є командним вузлом і являє собою регулятор з малою витратою газу.
У виконавчому вузлі (рис.1, а), який має фланцевий корпус вентильного типу з умовним діаметром Ду 100— 200 мм, сідло — змінне (кріпиться на різьбі), а з умовним діаметром Ду 50 — постійне. Зверху корпус закритий кришкою, під якою знаходиться фільтр для очистки газу, що надходить у пілот. Мембранна камера прикріплена до нижньої частини корпусу, всередині якої знаходиться мембранний привід. У центральне гніздо тарілки мембранного приводу упирається штовхач, а в нього — шток, які примушують плунжер переміщатися вертикально. На верхній кінець штока, що рухається в напрямній втулці, надітий плунжер з м'яким гумовим ущільнювачем.
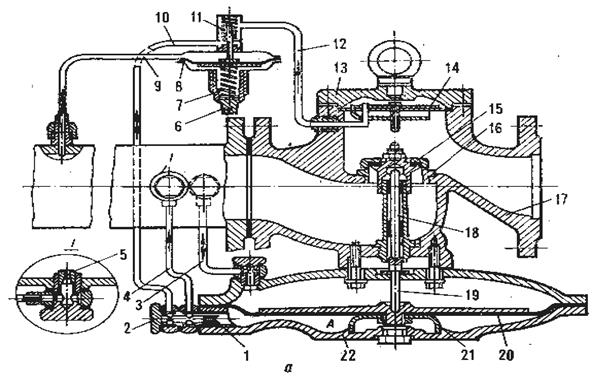
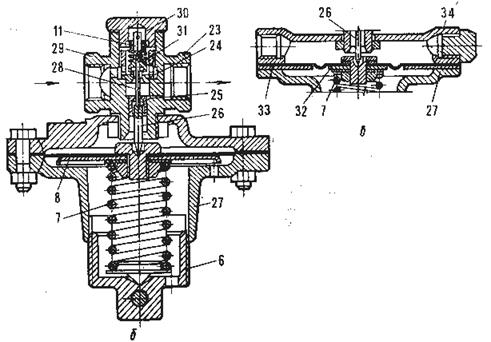
Рис.1. РегулятортискуРДУК-2
а — виконавчий вузол; б —
командний вузол (пілот); в —
мембранний привід командного
вузла;
1 — дросель; 2 — штуцер; 3 —
імпульсний трубопровід
виконавчого вузла; 4 —
скидний трубопровід; 5 —
скидний дросель; 6 —
регулювальний стакан пілота; 7 — регулювальна пружина пілота; 8 — мембранний привід пілота; 9 — імпульсний трубопровід пілота; 10 — трубопровід командного сигналу; 11 — плунжер пілота; 12 — трубка високого тиску; 13 — кришка; 14 — фільтр; 15 — плунжер виконавчого вузла; 16 — сідло; 17 — корпус; 18 — шток; 19 — штовхач; 20 — мембранний привід виконавчого вузла; 21 — опора: 22 — мембранна камера; 23 — штуцер командного сигналу; 24 — сідло пілота; 25 — втулка; 26 — штовхач пілота;
27 — кришка пілота; 28 — шток пілота; 29 — штуцер вхідного тиску; ЗО — пробка; 31 — пружина;
32 - диск; 33 — кільце; 34 — корпус
Пілот (рис.1, б) керує подачею сигналу командного тиску під мембранним приводом виконавчого вузла (камера А), підтримуючи заданий тиск після регулятора. Кришка мембранної камери пілота має два нарізних отвори. До одного із них підведений імпульсний трубопровід з контрольованим тиском у системі регулювання, а другий отвір закрито пробкою. Знизу мембранний привід обтиснений фланцем, в який вкручено регулювальний стакан, що стискає регулювальну пружину. На верху кришки розміщена хрестоподібна головка, що має вхідний і вихідний отвори. У середині головки знаходиться вузол плунжера з м'яким гумовим ущільнювачем. Плунжер перекриває сідло, нижче якого запресована гільза з отвором для направлення шпильки плунжера, що відділяє вихідний отвір головки пілота від його иадмембранної камери. Шпилька проходить через сідло і гільзу, упирається в штовхач, який в свою чергу обпирається на центр мембранного приводу. Газ, що надходить у регулятор, очищається фільтром і потрапляє у вхідний отвір головки пілота. Вихідний отвір з'єднано з підмембранною камерою А виконавчого вузла. На нижньому кінці імпульсного трубопроводу в з'єднувальному штуцері установлений демпферний дросель d1 = 0,8 мм для регулятора з Ду 50 мм і d1 =1,0 мм для регуляторів з іншими умовними діаметрами.
Зусилля вихідного тиску на мембранний привід пілота постійно дорівнює заданому. При підвищенні вихідного тиску, під дією сигналу зворотного зв'язку мембранний привід пілота переміститься у нижнє положення. Плунжер під дією пружини наблизиться до сідла, послаблюючи командний сигнал, що надходить під мембранний привід виконавчого вузла. При зниженні вхідного тиску мембранний привід пілота під дією регулювальної пружини переміститься у верхнє положення.
З'єднаний з мембранним приводом плунжер відійде від сідла, збільшуючи зазор. При цьому зростає сила командного сигналу, що надходить під мембранний привід виконавчого вузла.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.