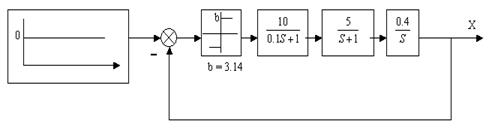
Рис.13.2.
Передаточна функція
розімкнутої системи має вид:

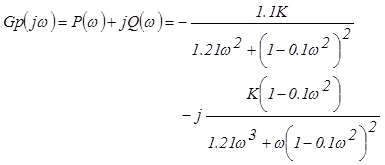
Комплексна передаточна
функція при цьому дорівнює
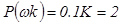
Частоту автоколивань
визначимо з умови:
 , при цьому
, при цьому 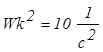 ,
, 
Для розглянутого елемента
коефіцієнт передачі визначається співвідношенням:
Амплітуду автоколивань
визначимо з умови
 , при цьому
, при цьому  .
.
Періодичне рішення має вид:
 .
.
ІІ. Порядок виконання роботи
2.1.
Відповідно до заданого варіанта по табл. 1 розрахувати параметри автоколивань у
системі, схема якої наведена на рис.13.1 при релейній характеристиці
підсилювача.
2.2.
Ввійти в середовище пакета SIAM і ввести схему моделі досліджуваної системи
відповідно до розрахованого варіанта.
2.3.
Виконати дослідження системи для чого необхідно:
виконати
моделювання (кл.F7), вибравши метод (кл. F2) і задавши параметри інтегрування
(t0=0, tk=5, крок = 0.01) і задавши довжину графіків 500
крапок;
-
вивести графік регульованої величини і її похідної у вікна;
-
одержати фазовий портрет досліджуваної системи при різних початкових умовах (10
-100) і визначити використовуючи графіки і таблиці параметри автоколивань.
2.4.
Порівняти дані експерименту з даними аналітичного розрахунку.
2.5.
Ввійти в середовище пакета СС ,ввести передаточну функцію розімкнутої системи,
створити частотний файл (0.01,1000,100,0), побудувати АФХ і визначити k
та P(k). Порівняти отримані дані з результатами моделювання і розрахунку.
2.6.
Повторити дослідження для нелінійних характеристик типу обмеження за модулем,
зона нечутливості та трипозиційне реле.
ІІІ. Контрольні питання
3.1.
Дайте визначення нелінійної системи.
3.2.
Перелічите методи дослідження нелінійних систем.
3.3.
Приведіть класифікацію нелінійних систем.
3.4.
Перелічите відмінні риси нелінійних систем.
3.5.
Приведіть класифікацію нелінійних елементів.
3.6.
Сформулюйте теореми Ляпунова про стійкість руху в нелінійних системах.
3.7.
Перелічити основні методи визначення стійкості граничних циклів.
3.8.
Пояснити сутність методу фазової площини.
3.9.
Перелічити методи побудови фазових портретів системи.
3.10.
Перелічити типи особливих крапок.
3.11.
Як визначити якість нелінійної системи?
Таблиця 1
|
|
K1,
1/с
|
K2,
1/с
|
K3,
1/с
|
T1,
c
|
T2,
c
|
B
|
a
|
Кн
|
1
|
10
|
5
|
0.4
|
0.1
|
1
|
3.14
|
2
|
1
|
2
|
|
|
|
|
|
|
|
|
3
|
|
|
|
|
|
|
|
|
4
|
|
|
|
|
|
|
|
|
5
|
|
|
|
|
|
|
|
|
6
|
|
|
|
|
|
|
|
|
7
|
|
|
|
|
|
|
|
|
8
|
|
|
|
|
|
|
|
|
9
|
|
|
|
|
|
|
|
|
10
|
|
|
|
|
|
|
|
|
Література
1.
Теория автоматического управления: Учебник для
вузов. Ч1/Под ред. А.А. Воронова- М.: Высш. Шк.,1986.-367 с.
2.
Теория автоматического управления: Учебник для
вузов. Ч2/Под ред. А.А. Воронова- М.: Высш. Шк.,1986. -504 с.
3.
Вероятностные методы в вычислительной технике. Под
ред. А.Н. Лебедева и Е.А. Чернявского - М.: Высш. Шк.,1986. -312 с.
4.
Справочник по теории автоматического управления.
/Под ред. А.А. Красовского- М.: Наука, 1987. -712 с.
5.
Васильев В.Г. Теорія сигналів і систем: Навч.
посібник. – К.: ІСДО, 1995. –68 с.
6.
Бойко Н.П., Стеклов В.К. Системы автоматического
управления на базе микро-ЭВМ.- К.: Тэхника,1989. –182 с.
7.
Автоматизированное проектирование систем
автоматического управления./Под ред. В.В. Солодовникова. – М.: Машиностроение,
1990. -332 с.