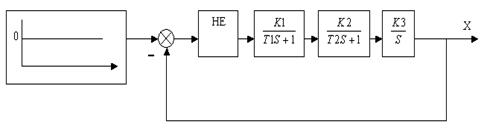
Рішення: Вихідну схему можна представити у виді (мал. 12.4).
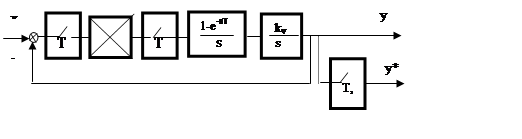
1. Визначимо передатну функцію розімкнутої безперервної частини
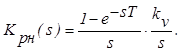
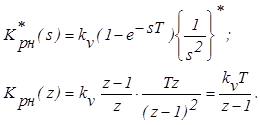
2. Виконаємо дискретне перетворення
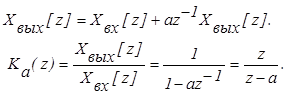
3. Визначимо передатну функцію цифрового автомата відповідно до алгоритму його функціонування
4. Визначимо передатну функцію розімкнутої дискретної системи

5. Визначимо передатну функцію системи помилково
6. Визначимо статичну помилку

ІІ. Порядок виконання роботи
Дослідження сталих помилок у ДСАУ з використанням пакета СС:
- для розглянутих прикладів ввести операторні зображення статичної і кінетичний помилки для статичної й астатической дискретної системи позначивши їхні G1(S)-G4(S) використати значення параметрів згідно варіанту з табл.1;
- використовуючи команду DTІME (параметр 4) одержати графіки для динамічних помилок і використовуючи курсор по графіках визначити сталі помилки і порівняти їх з розрахунковими;
- змінюючи параметри системи і впливу утановити їхній вплив на величину сталої помилки;
- результати роботи скопіювати у файл звіта по виконапнню лобораторної роботи.
1. Чим визначається точність дискретної системи?
2. Дати визначення статичній , кінетичної й інерційній помилці.
3. Перелічить типові впливи і приведіть їхнього зображення у формі Z-перетворення .
4. Як визначити помилку системи при типових впливах?
5. Як визначити помилку системи при довільному впливі?
6. Як впливає на величину ошибоки період квантування?
7. Який вплив на величини помилок роблять параметри системи?
8. Які методи підвищення точності САУ?
9. Як впливає порядок астатизму системи на її точність?
10. Як визначити порядок астатизму дискретної системи ?
11. Чим визначається порядок астатизму системи?
12. Як визначити статизм системи?
13. Дайте визначення добротності системи по швидкості і прискоренню.
14. Як впливають параметри системи і параметри регулятора на помилку по збурюванню?
K1 |
K2 |
T1, сек |
T2, сек |
Xo |
fo |
V, 1/с |
a,
|
|
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
2 |
2 |
10 |
1 |
0.5 |
2 |
1 |
2 |
10 |
3 |
5 |
1 |
0.5 |
2 |
5 |
10 |
3 |
8 |
4 |
10 |
2 |
0.2 |
1 |
10 |
5 |
4 |
7 |
5 |
1 |
5 |
0.1 |
2 |
1 |
2 |
5 |
6 |
6 |
2 |
10 |
1 |
0.5 |
2 |
1 |
6 |
5 |
7 |
5 |
1 |
0.5 |
1 |
5 |
10 |
7 |
4 |
8 |
10 |
2 |
0.2 |
2 |
10 |
5 |
8 |
3 |
9 |
1 |
5 |
0.1 |
1 |
1 |
2 |
9 |
2 |
10 |
2 |
10 |
1 |
0.5 |
2 |
1 |
10 |
1 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.