Розглянемо статичну систему (мал.6.2). Для заданої системи визначимо сталі помилки
|
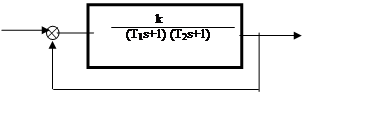 |
1. Статична помилка визначається співвідношенням

2. Кінетична помилка визначається співвідношенням

3. Інерційна помилка визначається співвідношенням

Розглянемо астатическую систему першого порядку (мал.6.3). Для заданої системи визначимо сталі помилки
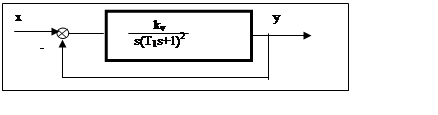
Рис. 6.3
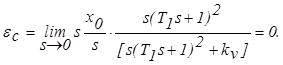
1. Статична помилка визначається співвідношенням
2. Кінетична помилка визначається співвідношенням

Т.е. помилка є функцією швидкості зміни вхідного впливу і коефіцієнта підсилення системи.
Інерційна помилка визначається співвідношенням
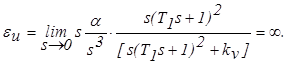
Інерційна помилка є функцією прискорення зміни вхідного впливу і коефіцієнта підсилення системи.
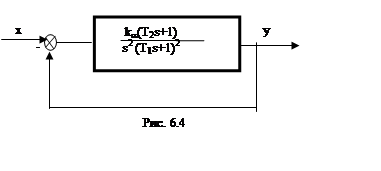 Розглянемо астатическую систему другого порядку (мал.
6.4).
Розглянемо астатическую систему другого порядку (мал.
6.4).
1. Статична помилка визначається наступним співвідношенням

2. Кінетична помилка визначається наступним співвідношенням

3. Інерційна помилка визначається наступним співвідношенням

- скопіювати кожну схему та графіки результату в файл звіту.
2.3. Досліджувати астатичну систему першого порядку зібрати схему моделі системи з астатизмом першого порядку (мал. 6.3.);
2.4. Досліджувати астатичну систему другого порядкузібрати схему моделі з астатизмом другого порядку (мал.6.4);
2.6. Дослідження сталих помилок у САУ з використанням пакета СС
- ввести операторні зображення статичної, кінетичної й інерційної помилки для статичної системи, а також астатичної першого і другого порядку позначивши їхній G1(S)-G9(S);
- використовуючи команду TIME (параметр 4) одержати графіки для динамічних помилок і використовуючи курсор по графіках визначити сталі помилки і порівняти їх з розрахунковими;
3. 11 Чим визначається порядок астатизму системи?
3.12. Як визначити статизм системи?
3.13. Дайте визначення добротності системи по швидкості і прискоренню.
3.14. Як впливають параметри системи і параметри регулятора на помилку по возмущению?
Таблиця 1
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.