Продолжение таблицы 2.4
Из таблицы и рисунка видно, что погрешность не превосходит допустимую погрешность в 5% и равна 3,98 %. Отсюда делаем вывод, что выбранный метод аппроксимации вполне подходит для данной передаточной функции.
Улучшение метода:
d = 1-h(tp) = 1-0,44 = 0,56
f =1-h(2tp) = 1-0,91 = 0,09

![]() сек
сек
![]() сек
сек
В результате расчетов получаем передаточную функцию:
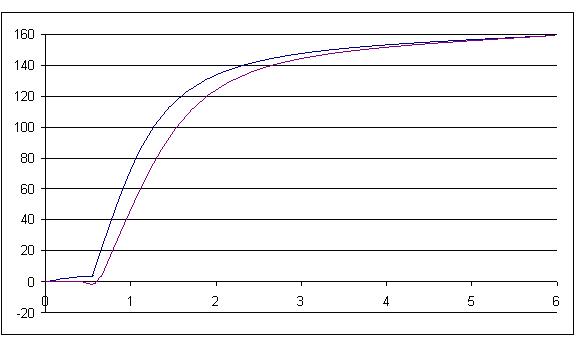
Рис.2.8. Совмещение экспериментальной и расчётной характеристики в одной координатной плоскости
Определяем ошибку аппроксимации ![]() и
результаты заносим в таблицу 2.5.
и
результаты заносим в таблицу 2.5.
Таблица 2.5.
|
t |
h(t) |
hулуч(t) |
|
|
0 |
0 |
0 |
0 |
|
0,2 |
2 |
0 |
1,333333 |
|
0,4 |
3 |
0 |
2 |
|
0,6 |
5,970378 |
0 |
3,980252 |
|
0,8 |
35,11011 |
21,64922 |
8,973925 |
|
1 |
66,23864 |
51,29281 |
9,963888 |
|
1,2 |
91,3705 |
75,4138 |
10,6378 |
|
1,4 |
109,7862 |
93,81574 |
10,64696 |
|
1,6 |
122,7079 |
107,7012 |
10,00447 |
|
1,8 |
131,5819 |
118,1582 |
8,949193 |
|
2 |
137,6085 |
126,0304 |
7,718741 |
|
2,2 |
141,677 |
131,9565 |
6,480357 |
|
2,4 |
144,4148 |
136,4174 |
5,331562 |
|
2,6 |
146,2539 |
139,7755 |
4,318901 |
|
2,8 |
147,4881 |
142,3033 |
3,456474 |
|
3 |
148,3159 |
144,2062 |
2,739781 |
|
3,2 |
148,871 |
145,6386 |
2,154907 |
|
3,4 |
149,2432 |
146,7169 |
1,68417 |
|
3,6 |
149,4927 |
147,5286 |
1,309376 |
|
3,8 |
149,6599 |
148,1396 |
1,013536 |
|
4 |
149,772 |
148,5996 |
0,781648 |
|
4,4 |
152,8472 |
152,9458 |
0,600928 |
|
4,8 |
154,8976 |
154,2064 |
0,460757 |
|
5,2 |
156,9313 |
156,4026 |
0,352473 |
|
5,8 |
158,954 |
158,5503 |
0,269104 |
|
6 |
159,9691 |
159,6615 |
0,205102 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.