Таким образом, ALU может оперировать четырьмя типами информационных объектов булевыми (1 бит), цифровыми (4 бита), байтными (8 бит) и адресными (16 бит). В ALU выполняется 51 различная операция пересылки или преобразования этих данных. Так как используется 11 режимов адресации, то путем комбинирования операций и режима адресации базовое число команд 111 до 255 из 256 возможных при однобайтовом коде операции.
Для защиты измерительной цепи от воздействия перенапряжения, защиты пользователя от возможного электрического удара, для обеспечения необходимой помехозащищённости предложено гальванически развязать измерительные цепи устройства.
В настоящее время наиболее широкое распространение получили схемы, использующие два варианта гальванической развязки:
· трансформаторной;
· оптоэлектронной.
Гальваническая развязка трансформаторного типа предполагает использование магнитоиндукционного элемента с сердечником или без него, напряжение Uвых на вторичной обмотке которого пропорционально напряжению Uвх на входе устройства. При применении трансформаторной гальванической развязки необходимо учитывать следующие её недостатки:
· несущий сигнал может создавать помехи, влияющие на выходной сигнал развязки;
· полоса пропускания ограничена частотой модуляции развязки;
· сравнительно большие габаритные размеры компонентов, реализующих развязку.
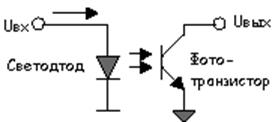
В настоящее время в связи с развитием технологии полупроводниковых устройств расширяются возможности по использованию оптоэлектронных развязывающих устройств, оптических вентилей (оптронов). Принцип работы оптрона проиллюстрирован на рисунке 2.14. Светоизлучающий диод, p-n-переход которого смещён в прямом направлении, излучает свет, воспринимаемый фототранзистором. Таким образом, осуществляется гальваническая развязка цепей, связанных со светодиодом, с одной стороны, и с фототранзистором, с другой.
К достоинствам оптоэлектронных развязывающих устройств можно отнести:
· способность осуществлять развязку в широком диапазоне напряжений, в том числе до величины 500 В, что является значением, принятым при реализации систем ввода данных;
· возможность передавать сигналы на высокой частоте (до десятков МГц);
· малые габаритные размеры.
Учитывая вышеперечисленные достоинства и недостатки, гальваническая развязка схемы выполнена для защиты от наводок, блуждающих токов, в длинной линии, исходящих от электровозов через оптопары.
В качестве управляющего устройства всей схемы измерения использован одноплатный миникомпьютер ICOP 6016.
|
Основные характеристики |
|
|
Оперативная память |
4 Мб |
|
Электронный диск |
288 Мб |
|
Com порт для интерфейса RS 485, RS 232 |
|
|
Условия эксплуатации |
(-20…+60) ºС |
|
Встроенный динамик |
|
Связь между измерительным процессором и весопроцессором (длина линии до 200 м) налажена посредством нитерфейса RS 485. Обмен данными с ПК осуществляется по интерфейсу RS 232.
Для осуществления диалога «пользователь – весы» предлагается использовать 4-х строчный символьный индикатор. Кроме того, предусмотрено 7 кнопок управления. Цифровые данные предусмотрено вводить с клавиатуры ПК.
Для питания схемы предлагается использовать импульсный БП, построенный на основе высокочастотного преобразователя с бестрансформаторным входом. Это устройство, питаясь от промышленной сети ~110В/220В, не содержит в своем составе громоздких низкочастотных силовых трансформаторов, такой источник питания обладает на порядок лучшими массогабаритными показателями по сравнению с линейными, а его КПД может достигать 90% и более. БП с импульсным высокочастотным преобразователем существенно улучшают многие характеристики устройств, питаемых от этих источников.
2.4 Алгоритмы реализации основных функций
Основные функциональные возможности прибора:
§ регистрация массы вагона;
Измеренные значения с каждого датчика, обрабатываются в процессоре измерительном и по запросу с весопроцессора поступают в миникомпьютер ICOP, где зашиты программы управления и обработки. Вес с i– того датчика определяется по формуле (1).
 ,
(1)
,
(1)
где Рi- суммарный вес i– того датчика;
![]() - разность между начальным и
измеренным значением;
- разность между начальным и
измеренным значением;
![]() - номинальная грузоподъемность
датчика;
- номинальная грузоподъемность
датчика;
РКП - рабочий
коэффициент передачи датчика (![]() датчика при номинальной
нагрузке);
датчика при номинальной
нагрузке);
В0 - калибровочный коэффициент;
γt - расчетный коэффициент температурной коррекции датчика.
Вес тележки определяется как сумма показаний датчиков одного модуля (МОДУЛЬ 1) на рисунке 1.1.
 ,
(2)
,
(2)
где РТ – вес тележки;
n – количество датчиков первого модуля.
Масса вагона определяется как сумма масс тележек вагона.
 ,
(3)
,
(3)
где РВ – вес вагона;
r – количество тележек.
§ регистрация массы состава;
Масса всего состава определяется как сумма масс вагонов, входящих в данный состав.
 ,
(4)
,
(4)
где РС j – вес j - того вагона;
m – количество вагонов.
§ счет числа вагонов;
Подсчет числа вагонов производится путем сложения каждого i– того элемента (вагона), входящего в состав.
 ,
(5)
,
(5)
где kВ – количество вагонов;
j – счетчик;
k – максимальное число вагонов в составе.
§ определение типа вагона;
Устройства взвешивания транспортных средств в движении являются автоматическими. Особенность этих систем заключается в том, что операции взвешивания зависят от типа вагона и при этом необходимо исключать взвешивание локомотива. Таким образом, должна быть создана автоматическая система, которая дает команду на начало и конец взвешивания, идентифицирует тип вагона, исключает взвешивание локомотива и т.д
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.