Асинхронний двигун (рис. 1.9) має алюмінієву або литу чавунну станину 10. Обмотка статора 9 укладена в пази сердечника 12 статора. Кінці фаз обмотки через отвір в станині виведені в коробку, яка складається з корпусу 21, перехідного патрубка 22 і кришки 20. Сердечник ротора 13, стягнутий стежнями обмотки і короткозамикаючими кільцями 7, жорстко посаджений на вал 2 двигуна. У короткозамикаючих кільцях виконані пази, в яких кріпляться вантажі 18, призначені для балансування ротора. Вал 2 ротору з шпонкою 3 обертається в двох підшипниках 5 і 19. Кільцеві хвилясті пружини 4 здійснюють вибірку зазорів, створюють попередній натяг підшипників і компенсують теплове подовження валу ротора, а також зменшують шум і вібрації двигуна при роботі. Для кріплення болтами 8 до станини, щити 1 і 16 мають приливи 25.
Для охолодження двигуна на вал 2 насаджений вентилятор 17, закритий кожухом 15, який кріпиться до станини гвинтами 14.
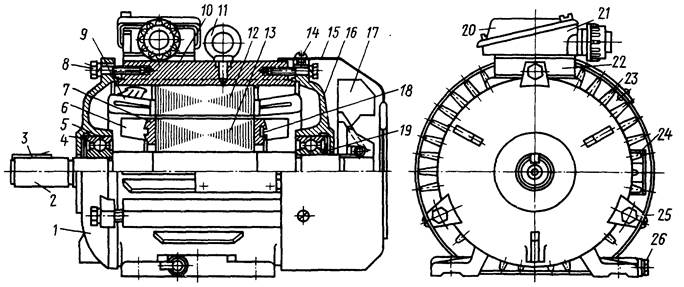
Рисунок 1.9 - Асинхронний закритий двигун з короткозамкненим ротором
Для напряму потоку повітря і збільшення поверхні тепловіддачі на зовнішній поверхні статора є ребра 23. Для охолодження всередині двигуна призначені лопатки 6. Збоку до станини кріпиться паспортна таблиця 24, на якій указується тип двигуна, його заводський номер, завод-виготовлювач, потужність двигуна, частота його обертання, нормальна напруга та інші дані. Для транспортування двигуна передбачений рим-болт 11, а для заземлення - болт 26.
Асинхронний двигун з короткозамкненим ротором є найбільш компактним, надійним і економічним в експлуатації, який зберігає приблизно постійну частоту обертання при змінах навантаження від мінімальної (при холостому ході) до номінальної. При живленні обмотки статора трифазним струмом в двигуні створюється магнітне поле, що обертається, яке перетинає замкнуті обмотки ротора і наводить в них струм.
Струм роторної обмотки взаємодіє з магнітним полем двигуна і в результаті створюється обертаючий момент, який приводить в обертання ротор двигуна в ту ж сторону, в яку обертається магнітне поле.
Якщо частоти обертання ротора і магнітного поля рівні, то магнітне поле не перетинає обмотку ротора і в ній не виникає струм, обертаючий момент при цьому відсутній. Тому частота обертання ротора завжди менше частоти обертання магнітного поля.
Оскільки магнітне поле двигуна при зміні навантаження в досить широких межах залишається постійним, то збільшення обертаючого моменту, повинне відбуватися цілісно в результаті збільшення струму в обмотці ротора. Щоб швидкість перетину магнітних ліній збільшилася, ротор при збільшенні навантаження повинен обертатися повільніше. Частота обертання і струм ротора змінюються автоматично.
Частоту обертання (об/хв) магнітного поля, що обертається, називають синхронною частотою обертання і визначають по формулі:
![]() (1.1)
(1.1)
де ![]() - частота живлячого струму;
- частота живлячого струму;
![]() - число пар полюсів.
- число пар полюсів.
Відношення різниці
частоти ![]() обертання магнітного
поля і частоти
обертання магнітного
поля і частоти ![]() обертання ротора до
частоти обертання поля
обертання ротора до
частоти обертання поля ![]() називають ковзанням і
визначають
за формулою:
називають ковзанням і
визначають
за формулою:
![]() (1.2)
(1.2)
Двигуни з
частотою обертання ротора ![]() що відрізняється від
синхронної частоти обертання магнітного поля
що відрізняється від
синхронної частоти обертання магнітного поля ![]() називають
асинхронними. Частота обертання ротора (об/хв) асинхронних електродвигунів
визначається залежністю:
називають
асинхронними. Частота обертання ротора (об/хв) асинхронних електродвигунів
визначається залежністю:
![]() (1.3)
(1.3)
Отже, частота обертання асинхронного двигуна може змінюватися при зміні частоти живлячого струму, ковзання і числа пар полюсів. У верстатобудуванні поширено регулювання частоти обертання асинхронного двигуна зміною числа пар полюсів. Таке регулювання буває двох- і трьохступенчатим.
Момент ![]() (Н/м) на валу двигуна,
кутова швидкість
(Н/м) на валу двигуна,
кутова швидкість ![]() (1/с) обертання його валу, частота
(1/с) обертання його валу, частота ![]() (об/хв) обертання валу
двигуна і механічна потужність
(об/хв) обертання валу
двигуна і механічна потужність ![]() (Вт),
що розвивається двигуном, зв'язані наступною залежністю:
(Вт),
що розвивається двигуном, зв'язані наступною залежністю:
![]() (1.4)
(1.4)
де ![]()
Механічна
характеристика трифазного асинхронного короткозамкненого двигуна показана на рис. 1.10
(крива
1). При пуску двигуна, ковзання ![]() . Якщо у електродвигуна
повністю відсутній будь-який опір його обертанню, то
. Якщо у електродвигуна
повністю відсутній будь-який опір його обертанню, то ![]() . Таке обертання
називають ідеальним холостим ходом. Таким чином, при наростанні швидкості
обертання від
. Таке обертання
називають ідеальним холостим ходом. Таким чином, при наростанні швидкості
обертання від ![]() до
до
![]() ковзання змінюється
від 1 до 0. Частина характеристики, замкнена
в межах від
ковзання змінюється
від 1 до 0. Частина характеристики, замкнена
в межах від ![]() до
до![]() , відповідає режиму
роботи двигуна.
, відповідає режиму
роботи двигуна.
У реальних умовах при
холостому ході є опір обертанню ротора (викликане тертям в підшипниках, опором
повітря обертанню вентилятора та
ін.), внаслідок чого ![]() і з'являється
ковзання. Критичний момент
і з'являється
ковзання. Критичний момент ![]() визначає
перевантажувальну здатність електродвигуна, якій відповідає критичне ковзання
визначає
перевантажувальну здатність електродвигуна, якій відповідає критичне ковзання![]() .
.
Частина характеристики,
замкнена в межах від ![]() до
до ![]() , є робочою частиною
механічної характеристики. У цій області, де момент двигуна мало залежить від
частоти його обертання, працюють всі асинхронні двигуни приводу верстатів.
, є робочою частиною
механічної характеристики. У цій області, де момент двигуна мало залежить від
частоти його обертання, працюють всі асинхронні двигуни приводу верстатів.
У тій частині характеристики де електроприводи верстатів не працюють, цю ділянку вони проходять тільки в процесі пуску.
Найбільша потужність, з
якою може працювати двигун в нормальному для нього режимі, а також момент,
частота
![]() обертання двигуна і
ковзання, які відповідають допустимому струму, називають номінальними.
обертання двигуна і
ковзання, які відповідають допустимому струму, називають номінальними.
У вітчизняних
електродвигунів відношення критичного моменту до номінального
![]()
У перший момент пуску
двигуна, коли ротор ще нерухомий (![]() ), електродвигун
розвиває початковий пусковий момент
), електродвигун
розвиває початковий пусковий момент ![]() .
Відношення
.
Відношення ![]()
У довідниках зазвичай
наводяться наступні технічні дані асинхронних двигунів: номінальна потужність
на валу ![]() (кВт);
(кВт);
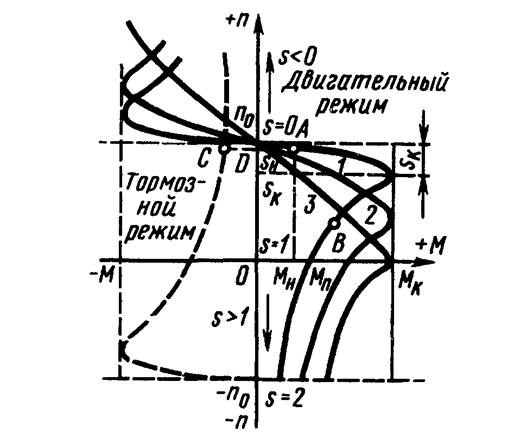
Рисунок 1.10 - Механічні характеристики асинхронного двигуна
номінальна частота обертання
![]() (об/хв);
синхронна частота обертання
(об/хв);
синхронна частота обертання ![]() (об/хв)
і відношення
(об/хв)
і відношення ![]() і
і
![]() . У електродвигуна з
фазним ротором активний опір ланцюгу
ротора можна змінювати, вводять в цей ланцюг реостат,
при цьому критичне ковзання
. У електродвигуна з
фазним ротором активний опір ланцюгу
ротора можна змінювати, вводять в цей ланцюг реостат,
при цьому критичне ковзання ![]() змінюватиметься
пропорційно активному опору ланцюгу ротора. Робоча частина механічної
характеристики отримує при цьому більший нахил. Критичний момент
змінюватиметься
пропорційно активному опору ланцюгу ротора. Робоча частина механічної
характеристики отримує при цьому більший нахил. Критичний момент
![]() не залежить від
активного опору в ланцюзі ротора і залишається постійним.
не залежить від
активного опору в ланцюзі ротора і залишається постійним.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.