1. Системи без зворотного зв'язку, коли заданий цикл здійснюється з необхідною послідовністю контролю робочими органами верстата правильності його здійснення.
2. Системи із зворотним зв'язком, коли за допомогою спеціального датчика порівнюється дійсне положення робочого органу верстату (столу) з потрібним за програмою і при розузгодженні свідчень датчика і програми створюється сигнал управління, що ліквідовує це розузгодження.
Основні типи механізмів управління можуть бути представлені наступною схемою:
Характерною особливістю розвитку механізмів управління сучасними верстатами є автоматизація управління із застосуванням електричних, а у ряді випадків гідравлічних і пневматичних методів подачі команд.
У сучасних верстатах часто поєднується ручне управління з елементами автоматичного управління окремими перемиканнями.
Механізми ручного управління повинні мати таку конструкцію на верстаті, щоб стомлення робочого було мінімальне.
Для цього необхідно враховувати геометрію і механіку людського тіла і вирішувати питання про зону розташування органів управління, допустимі зусилля на рукоятках, послідовності перемикання і інші питання.
Необхідно також враховувати фізіологічні особливості людини, наприклад бажаність пауз при роботі для відновлення працездатності мускул, ефективність дії колірних сигналів (лампочок) та ін.
Характерним прикладом обліку фізіологічних особливостей людини є мнемонічність системи управління, тобто такий пристрій, при якому робочий не напружував би зайве свою пам'ять, щоб вирішити, де знаходиться дана рукоятка, в яку сторону її треба повернути і т.д.
Наприклад, при включенні руху робочих органів верстата мнемонічність управління досягається за рахунок того, що напрям включення або переміщення рукоятки співпадають з напрямом переміщення даного вузла.
Для обліку геометрії тіла людини необхідно виходити із співвідношень його зросту і розмірів кінцівок з тим, щоб уникати нахилу корпусу при роботі. Нормальний зріст людини можна прийняти Н = 1720 мм.
Важливо також знати той простір, який може обслужити робочий тільки за рахунок рук, не нахиляючи плечей і корпусу. При роботі на верстатах з ручним управлінням необхідно добиватися не тільки легкості управління, але і зручності спостереження за процесом обробки. Для верстатів середніх розмірів виконання цієї вимоги зазвичай не викликає утруднень за винятком тих випадків, коли обробка супроводжується зняттям великої кількості стружки (швидкісне різання на токарних, фрезерних верстатах) або різання відбувається з рясним охолодженням (зуборізні верстати, багатошпиндельні автомати). При обробці крупних деталей місце обробки може бути віддалене від робочого. В цьому випадку робоче місце верстатника часто поміщають разом з рухомими вузлами верстата.
До систем управління у верстатах пред'являють наступні основні вимоги:
1) надійність, як безвідмовність спрацьовування всієї апаратури. Чим вище ступінь автоматизації системи управління, тим вище вимоги до її надійності;
2) швидкодія системи управління, пов'язана з витратами часу на введення, переробку інформації і виконання команд. У сучасних високоавтоматизованих системах управління введення і переробка інформації здійснюються з тими ж швидкостями, що і в цифрових обчислювальних машинах, а керовані двигуни здатні відпрацьовувати до 20 тисяч команд в секунду.
3) точність систем управління, що характеризується похибками у відробітку тих або інших команд. Наприклад, систематична і випадкова складова помилки системи управління породжують відповідну помилку позиціонування вузла верстата і, як наслідок, похибку обробки.
2.1.2 Рукояточне управління
Найбільш проста багаторукояточна система управління. В цьому випадку для кожного перемикання передбачений свій орган управління - рукоятка, педаль, штурвал. Передавальні ланки від рукоятки до відомої ланки можуть бути вельми різноманітними.
Наприклад, для переміщення блоків шестерень коробок швидкостей застосовують рейку поступально переміщаючу вилку. У разі невеликих осьових переміщень застосовується гойдаюча вилка або важіль, причому для кращої компоновки рукояток управління можна поміщати дві рукоятки на одній осі.
Застосування багаторукояточних систем доцільне лише у верстатах з невеликим числом механізмів, що перемикаються і порівняно рідкісними перемиканнями.
При збільшенні числа рукояток погіршується зручність обслуговування, росте час, необхідний для перемикань.
Однорукояточне управління істотно спрощує обслуговування верстата і сприяє підвищенню продуктивності верстатів з ручним управлінням. Розрізняють системи однорукояточного управління послідовної дії (рис. 2.1, а) і системи управління виборчої (вибіркової) дії (рис. 2.1, б). У системах послідовної дії передбачають строго задану послідовність перемикань. Для того, щоб здійснити зміну частоти обертання, доводиться часто проводити непотрібні проміжні перемикання, що і є основним недоліком цього способу. На ряду з цим системи послідовної дії відрізняються простотою і високою надійністю.
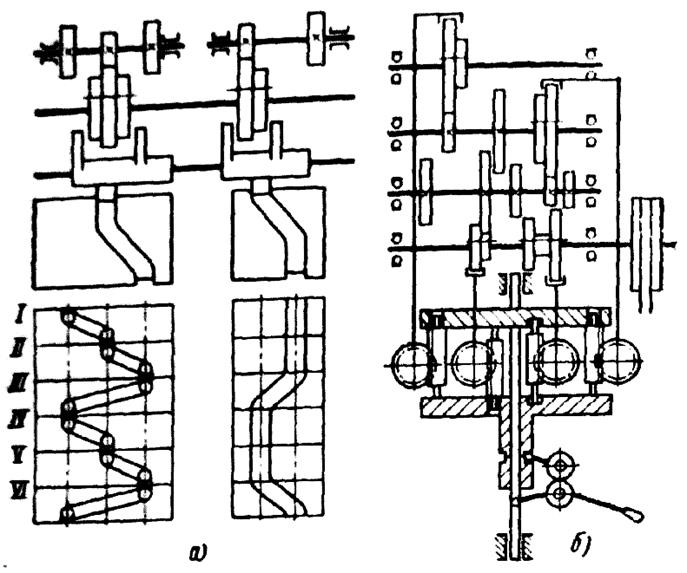
а - послідовної дії; б - виборчої дії
Рисунок 2.1 - Однорукояточні системи управління
Системи виборчої дії складні у виготовленні, але забезпечують значну зручність обслуговування. Принцип їх дії пояснює приклад, приведений на рис. 2.1, б). Між двома дисками з отворами, розташованими в певному порядку, розміщені зубчаті рейки. Кожна зубчата рейка через відповідну передачу пересуває ковзаючий блок зубчатих коліс в коробці швидкостей. При перемиканні диски спочатку розводяться, потім повертаються в потрібну позицію і зводяться. Залежно від розташування отворів на дисках в даній позиції рейки переміщаються в ту або іншу сторону і відповідно переміщають подвійні блоки зубчатих коліс, при цьому встановлюється необхідна частота обертання на шпинделі верстата.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.