Верстати з кулачковим управлінням, так звані кулачкові автомати, зазвичай мають розподільний вал з набором кулачків. Координація всіх рухів здійснюється при рівномірному обертанні розподільного валу, один оборот якого визначає автоматичний робочий цикл. Іноді застосовують кулачкове управління і з складнішою структурою, коли розподільний вал обертається з різною частотою обертання при робочих і допоміжних рухах, а також зустрічаються верстати-автомати з декількома розподільними валами.
Управління з регульованими упорами зустрічається у верстатах цільового призначення. Ці системи управління іноді підрозділяють на тимчасові, коли послідовність роботи упорів запрограмована в часі, і на шляхові, коли команда від чергового упору поступає після виконання команди попереднього, тобто після проходження робочим органом верстата заданого шляху. Зустрічаються і змішані системи, частково тимчасового, частково шляхового управління.
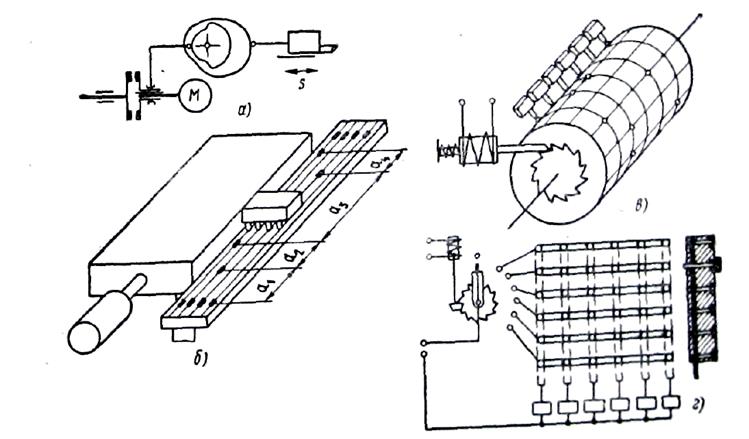
а - кулачки; б - регульовані упори; в - командоапарат; г - штекерна панель упору
Рисунок 2.3 - Програмоносії в системах управління
Перевагою системи шляхового управління є її висока надійність і менші витрати часу на переналагодження в порівнянні з кулачковою системою управління. У зв'язку з цим подібні системи зустрічаються в спеціалізованих верстатах для серійного виробництва.
Командоапарати є різновидом регульованих упорів, зосереджених в одному, достатньо компактному органі управління. Проте у такому вигляді командоапарати у зв'язку з великими габаритами і складним переналагодженням у верстатах використовують рідко. Для тієї ж мети застосовують штекерні панелі у верстатах із спрощеним ЧПУ.
2.2 Розробка механізму управління приводомголовного руху
В якості механізму управління використовуємо командоапарат. Командоапарат (рис. 2.4) складається з барабану 1, який жорстко встановлений на валу 2 та який може бути повернутий у потрібну позицію за допомогою рукоятки 3.
Поворот на потрібну позицію здійснюється за вказівником частот 4. Барабан має ряд доріжок, кількість яких звичайно визначається кількістю електромагнітних муфт. На цих доріжках встановлені кулачки 5 у місцях відповідних прийнятому варіантові порядку переключення передач. Кожен кулачок діє на кінцеві вимикачі 6 (ВК1 – ВК8), включаючи відповідну комбінацію електромагнітних муфт (ЕМ1 – ЕМ8).
Зробимо розгортку 7 барабана та покажемо розташування кулачків у місцях, які відповідають прийнятому варіантові вмикання ступенів коробки швидкостей. На перетині рядка з відповідною доріжкою встановлюються кулачки у місцях відповідно до прийнятого варіанту порядку переключення передач. Кожен контакт панелі діє через електричне коло управління, забезпечуючи вмикання відповідних комбінацій електромагнітних муфт для вмикання відповідних передач.
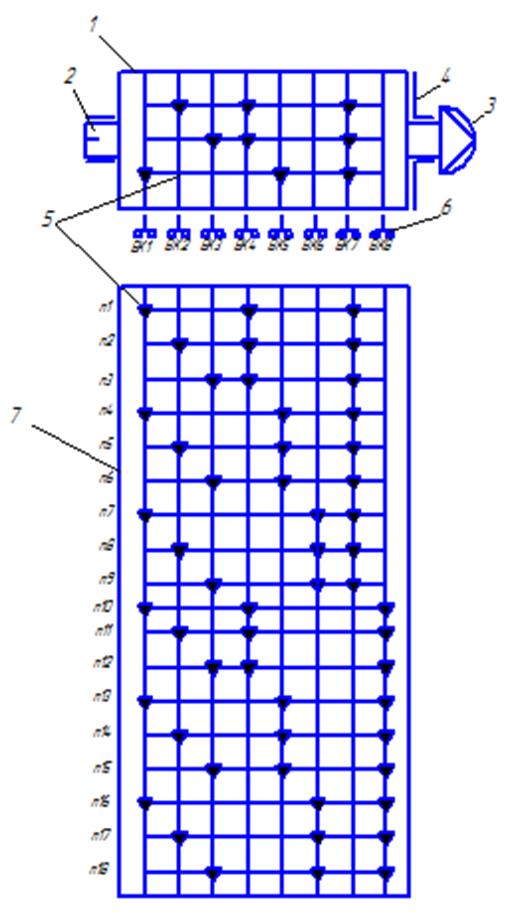
Рисунок 2.4 - Командоапарат
2.3 Розробка електросхемиуправління приводомголовного руху
Після розробки механічного управління(командо апарат), здійснюється монтаж електросхем управління ПГР, який сприймає сигнал від механізма управління.
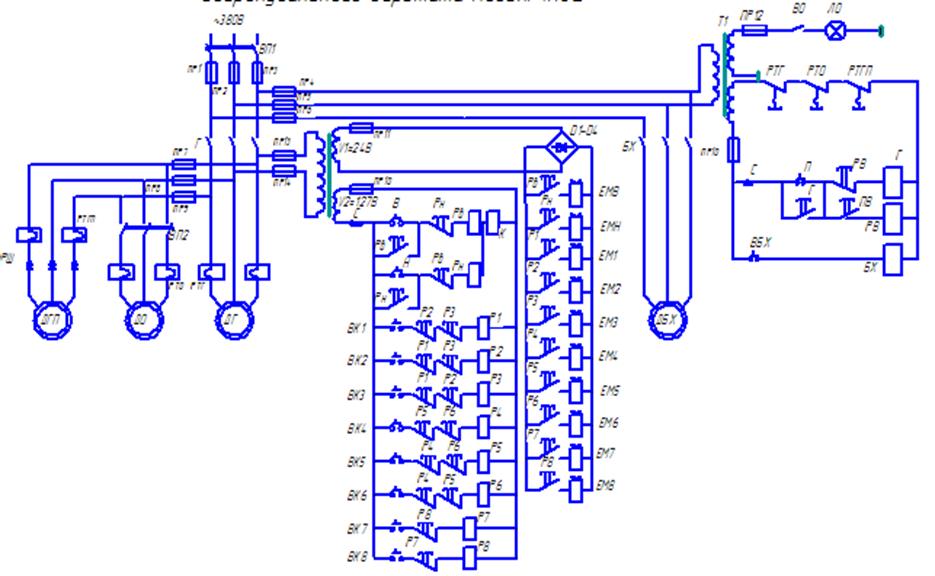
Рисунок 2.5 - Електросхема управління приводом головного руху
Для коробки швидкостей з структурною формулою: 18=3×3×2 також присутній реверсивний механізм.
Живлення силового ланцюга здійснюється трьохфазним струмом через три фази.
При вмиканні рукоятки ВП струм через фази біжить на живлення понижуючого трансформатора.
Вирівнювання струму виконується за допомогою діодного моста, це необхідно так, як спершу подається перемінний струм, а електромагнітні муфти працюють на постійному струмі.
Вторична обмотка V2 живить схему правління, кнопка С необхідна для забезпечення зупинки живлення усієї схеми управління.
Для прямого обертання шпинделя верстата по ходу часової стрілки- кнопка В, для звортнього(проти часової стрілки)- кнопка Н, яка розташована на пульті керування.
При натисканні однієї з цих кнопок, наприклад: кнопки В, вмикається ланцюг живлення реле Rв і контактора К.
Реле Рв своїми нормально відкритими контактами шунтує кнопку В і вмикає електромагнітні муфти, які забезпечують кінематичне замикання ланцюга прямого обертання шпинделя верстата, а своїми нормально закритим контактом розмикають ланцюг зворотнього включення шпинделя верстата.
Одночасно з цим контактор К своїми нормально відкритими контактами вмикає ланцюг живлення двигуна привода головного руху.
Заданна частота обертання шпинделя верстата забезпечується комбінацією включення електромагнітних муфт ЭМ1, ЭМ2, ЭМ3, ЭМ4, ЭМ5, ЭМ6, ЭМ7, ЭМ8.
Забеспечення включення електромагнытних муфт лягаэ на реле Р1-Р8, керування котрим здыйснюэться через кынцевы вимикачы ВК1- ВК8.
У схемы, також, э блокировки, якы не дозволяютьстатися випадковому включенню ланцюгів.
З цією метою в схему управління включені нормально закриті контакти даних реле.
2.4 Розрахунок двигуна
Трифазний асинхронний двигун має такі дані у номінальному режимі:
Потужність на валу
![]() ;
;
Частота обертання поля
статора
![]() ;
;
Ковзання
![]() . Перевантажна
здатність з обертаючого моменту
. Перевантажна
здатність з обертаючого моменту ![]() .
.
Розрахунок залежності ![]() при
при ![]() визначається за
формулою Клосса:
визначається за
формулою Клосса:

(2.1)
де ![]() - критичне ковзання,
яке визначається за формулою:
- критичне ковзання,
яке визначається за формулою:

(2.2)
![]() -
номінальна частота обертання двигуна,
-
номінальна частота обертання двигуна,
![]() .
.
(2.3)
Номінальний і максимальний обертаючі моменти:

(2.4)
![]()
(2.5)
Тепер, задаючись
значеннями ![]() від 0 до 1,
необхідно визначити значення обертаючого моменту за формулою Клосса.
При цьому зауважимо, що на частині залежності
від 0 до 1,
необхідно визначити значення обертаючого моменту за формулою Клосса.
При цьому зауважимо, що на частині залежності ![]() , яка відповідає
стійким режимам роботи двигуна (
, яка відповідає
стійким режимам роботи двигуна (![]() ), достатньо мати
чотири точки при
), достатньо мати
чотири точки при ![]() ;
; ![]() ;
; ![]() ;
; ![]() .
.
На ділянці залежності
![]() з
нестійкими режимами роботи двигуна (
з
нестійкими режимами роботи двигуна (![]() ) можна задатися такими
значеннями ковзання
) можна задатися такими
значеннями ковзання ![]()
При ![]() ,
,
![]() .
.
При ![]() ,
,

При ![]() ,
,

При ![]() ,
,

При ![]() ,
,

При ![]() ,
,

При ![]() ,
,

При ![]() ,
,

Результати розрахунку зведено до таблиці 2.1.
Пусковий момент двигуна
визначається при ![]() і
дорівнює
і
дорівнює
![]() , тоді кратність цього
моменту:
, тоді кратність цього
моменту:
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.