(2.6)
Таблиця 2.1 - Дані розрахунку залежності
![]()
|
|
0 |
|
0,2 |
|
0,4 |
0,6 |
0,8 |
1 |
|
|
0 |
32,15 |
59,24 |
65,02 |
62,96 |
53,03 |
43,81 |
36,78 |
За даними таблиці 2.1
на рис. 2.6
зображено залежність ![]() .
.
Рисунок 2.6 -
Залежність ![]()
3 СИНТЕЗ ЕЛЕКТРОАВТОМАТИКИ
Розвиток промислового устаткування, у тому числі і металорізальних верстатів йде по шляху підвищення рівня ароматизації виконуваних операцій, що висуває особливі вимоги до електроавтоматики. Одночасно зі збільшенням обсягу розв'язуваних задач при проектуванні виникають проблеми, зв'язані зі зменшенням розмірів станцій електроустаткування, простотою його налагодження, діагностикою несправностей і їх оперативним усуненням, підвищенням надійності роботи.
Ці проблеми привели до вирішення задачі синтезу функцій электроавтоматики на новому рівні - з використанням програмних методів рішення.
При синтезі принципових схем управління електроавтоматикою промислових механізмів потрібно привести задані умови роботи механізму до виду, зручному для аналізу. Така ж задача виникає при розробці типових схем шифраторів і дешифраторів, лічильників, регістрів і т.д. При вирішенні цієї задачі застосовують циклограми і діаграми роботи, оператори стану і подій, карти і таблиці станів, таблиці включень.
Логічні схеми пристроїв управління механізмів можна поділити на:
1) комбінаційні схеми, в яких стан вихідний сигналів залежить тільки від стану вхідних сигналів у визначений момент часу;
2) послідовні схеми, в яких стан вихідних сигналів залежить як від стану вхідних сигналів в цей момент, так і в інші моменти часу, в тому числі це схеми, що утримують елементи пам’яті.
Схеми управління будь-яких механізмів, наприклад схема управління приводом головного руху верстата або схема управління вибором та заміною інструменту, як правило є цифровими автоматами, до складу яких входять схеми обох видів. Аналіз та синтез подібних схем складні, тому в інженерній практиці схему управління поділяють на кінцеві підсхеми, що описуються рівняннями алгебри-логіки.
3.1 Синтез схемиуправління приводом головного руху через елементи алгебри-логіки
У зв'язку з тим, що синтез схем электроавтоматики з використанням апарата алгебри-логіки є універсальним засобом, придатним для будь-якої елементної бази, основні правила розглянемо як для безконтактних, так і для релейних схем.
Правила побудови релейних схем:
1) вихідне логічне рівняння перетвориться до виду И, ИЛИ і мінімізується;
2) прямомузначенню логічної перемінної в рівнянні відповідає контакт, що замикається, реле (нормально-відкритий) у принциповій схемі;
3) інверсному значенню логічної перемінної в рівнянні відповідає контакт, що розмикається, реле (нормально-закритий);
4) логічному добутку перемінних відповідає послідовне з'єднання контактів;
5) логічній сумі перемінних відповідає рівнобіжне з'єднання контактів.
Правила побудови безконтактних схем:
1) вихідне логічне рівняння необхідно привести до виду, що складається тільки з елементарних логічних операцій, реалізованих елементами обраної проектувальником елементної бази і мінімізувати;
2) кожної елементарної логічної операції рівняння в принциповій схемі відповідає елемент, що реалізує цю операцію;
3) при багаторазовій входимості в рівняння однієї елементарної логічної функції в іншу по логічній сумі, чи добутку інверсії накреслення схеми варто починати від останньої внутрішній входимості і закінчувати зовнішньою.
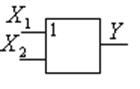
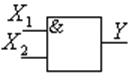
Побудуємо таблиці елементів релейно-контактних і безконтактних схем:
Таблиця 3.1 - Елементи релейно-контактних схем
|
Реалізована функція |
Елемент управління |
Релейний еквівалент |
|
Пряме значення логічної перемінної |
|
|
|
Інверсне значення логічної перемінної |
|
|
|
Логічний добуток перемінних |
|
|
|
Логічна сума перемінних |
|
|
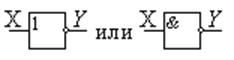
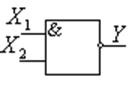
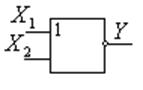
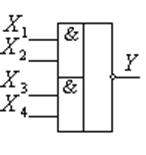
Таблиця 3.2 - Елементи безконтактних схем
|
Функція |
Елемент рівняння |
Еквівалент у безконтактній схемі |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Для здійснення синтезу схеми управління запишемо наступні логічні рівняння, що характеризують електросхему управління (рис. 3.1).
![]() ;
;
Рв=(В+Рв)∙Рн;
Рн=(Н+Рн)∙Рв;
Р1=ВК1∙Р2∙Р3;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]()
Для синтезу релейної схеми управління використовуємо логічні елементи серії ЛА 153, ЛА 154 та ЛА 155.
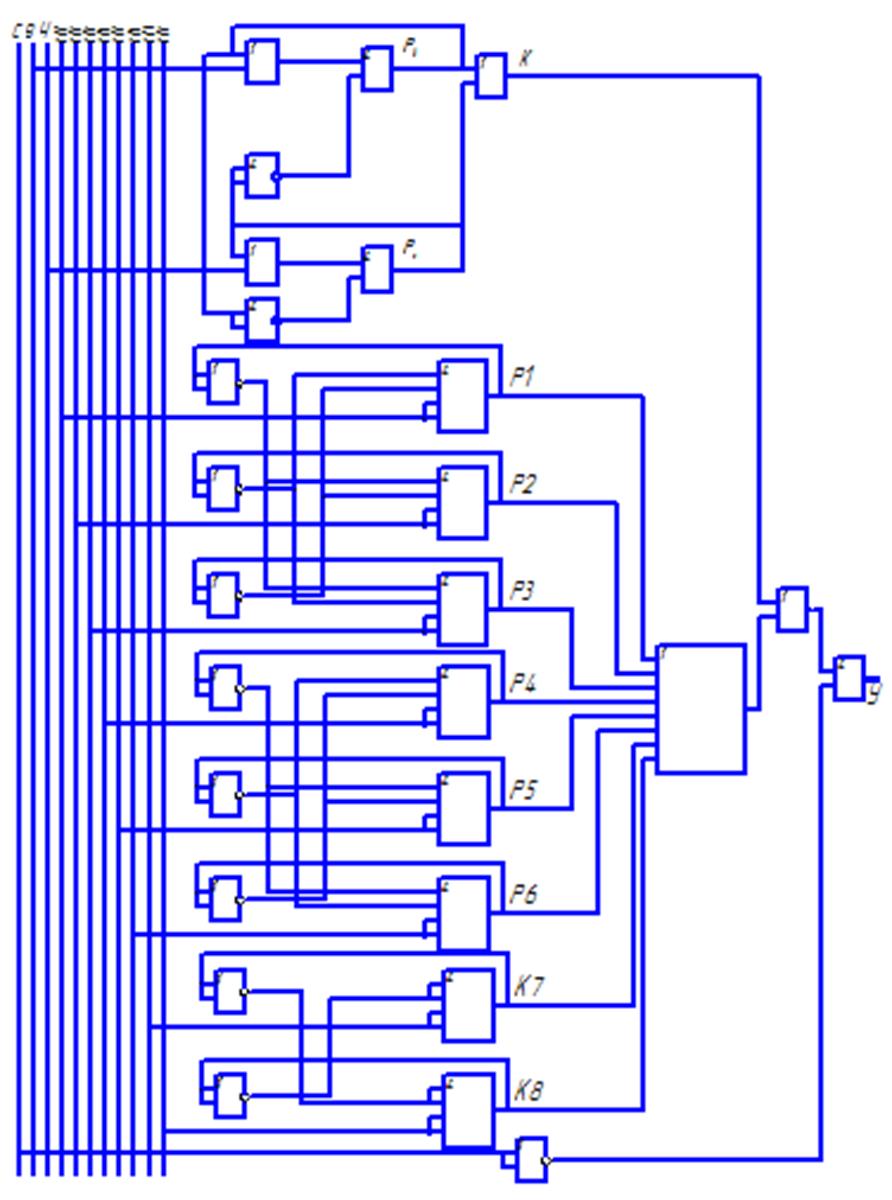
Рисунок 3.1 - Синтез схеми електроавтоматики
4 ЕКОНОМІЧНЕ ОБГРУНТУВАННЯ
Для обґрунтування варіанту технологічного процесу необхідно виявити зростання продуктивності праці шляхом порівняння трудоємкості обробки першого та другого варіантів. Для порівняння обрана операція свердлення.
У проектованому варіанті застосовується верстат з модернізованою системою керування, який економить час обробки деталей. Також у новому технологічному процесі використовуються більш зносостійкі різці, які потребують меншої кількості переточок. Для виконання техніко-економічного обґрунтування застосованого технологічного процесу обробки всі необхідні дані заносимо до таблиці 4.1.
Таблиця 4.1 - Вихідні дані по варіантам
|
Найменування |
Одиниця виміру |
Позначення |
Варіанти |
|
|
I |
II |
|||
|
Річний випуск деталей |
шт. |
|
25000 |
25000 |
|
Обладнання |
||||
|
1) модель |
1К62 |
1К62 |
||
|
2) кількість |
шт. |
1 |
1 |
|
|
3) ціна за одиницю |
грн. |
|
30000 |
30000 |
|
Норма штучного часу |
хв. |
|
7,638 |
5,055 |
|
Норма машинного часу |
хв. |
|
3,104 |
2,87 |
|
Потужність електродвигуна |
кВт |
|
4,5 |
4,5 |
|
Розряд роботи |
3 |
3 |
||
|
Кількість робітників |
чол. |
|
1 |
1 |
|
Виробнича площа під обладнання |
м2 |
|
5 |
5 |
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.