Датчики-пілоти. Широке застосування в системах автоматичного управління мають датчики-пілоти.
Пілоти служать для дистанційного керування золотниками, коли останні є не датчиками, а проміжними пристроями.
За принципом своєї дії вони нагадують золотники і призначені для управління невеликими потоками рідини.
Шляхові датчики пневматичного типу виконуються у вигляді золотників, пілотів або розподільних кранів, конструкція яких нагадує гідравлічні датчики аналогічних типів. Часте застосування мають в системах автоматичного управління клапанні розподільні крани.
Більшість датчиків пневматичного типу мають недолік: для повного спрацьовування потрібне досить велике переміщення рухомої частини верстата (довжина ходу 12-13 мм). Існують конструкції, де цей недолік частково усунений.
Найчастіше роль шляхових датчиків механічного типу грають кулачки і упори - жорсткі і рухомі. Рухома частина верстата, зустрічаючи на своєму шляху жорсткий упор, позбавлена можливості продовжувати переміщення, і в ланцюзі її приводу зусилля зростають. Як тільки вони перевищать задану величину, відбувається спрацьовування виконавчої ланки.
Рухомі упори кріпляться як на нерухомій, так і на рухомій частині верстата. При дії на них вони викликають поворот або поступальне переміщення проміжної або виконавчої ланки.
Силові датчики створюють командний імпульс в мить, коли зусилля, що діють у відповідних механізмах верстата, або тиск робочого середовища в системі управління досягає певного значення.
Електричні силові датчики. Широко вживаним електричним силовим датчиком є реле струму миттєвої дії. Воно складається з сердечника з котушкою, яка включена в мережу послідовно з обмоткою виконавчого органу. У нормальному положенні якір реле дією пружини відведено від сердечника і замикає контакти, включені послідовно з виконавчим органом. При перевантаженні сила струму, що проходить через реле, зростає, а при певному її значенні сердечник притягає якір, долаючи дію пружини, і розмикає контакти.
Гідравлічні силові датчики. Найбільш простим силовим датчиком гідравлічного типу є напірний золотник. В цьому випадку робоче середовище з нагнітального трубопроводу підводиться до напірного золотника, і прохід її через останній неможливий до тих пір, поки тиск цього середовища не досягне необхідного значення.
У системах автоматичного управління часто зустрічається необхідність вільного проходу робочого середовища через датчик до одного з проміжних або виконавчих органів, щоб доступ до іншого органу відкривався після того, як тиск середовища в системі перевищить задане значення. У таких випадках добрі результати дає використання в якості силових датчиків розвантажувальних золотників .
Пневматичні силові датчики. Силові датчики пневматичного типу в принципі аналогічні гідравлічним. Пневматичні датчики, призначені для малого тиску, повинні мати високу чутливість і виконуються з сильфонами.
Сильфон - тонкостінна металева судина (зазвичай з латуні, фосфорної бронзи або неіржавіючої сталі), що має форму циліндра з розташованими по колу хвилеподібними складками. Під дією різниці тиску, що діє у внутрішній порожнині і навколишньому середовищі, виникає пружне подовження або стиснення сильфона в осьовому напрямі, залежно від знаку різниці тиску.
У межах практично зустрічаємих в системах автоматичного управління металорізних верстатів різниць тиску, між останніми і величиною пружної деформації існує лінійна залежність: зміна довжини сильфона прямо пропорційно зміні різниці тиску. У верстатобудуванні зазвичай застосовуються сильфони із зовнішнім діаметром 75-120 мм.
Призначення швидкісних датчиків - дати імпульс у тому випадку, коли швидкість руху відповідного елементу верстата буде вища або нижче заданого значення. Основне застосування мають швидкісні датчики електричного типу, які залежно від принципу дії можуть бути індуктивними, відцентровими і типу тахогенератора.
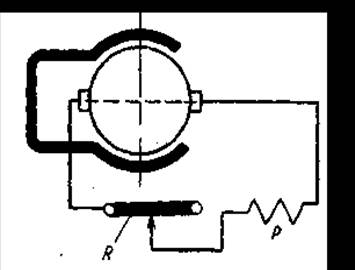
Рисунок 1.8 - Тахогенератор
Індуктивний швидкісний датчик типу РКС має на своєму валу жорстко закріплений постійний магніт. Магніт охоплюється кільцем з обмоткою на своїй внутрішній поверхні. При обертанні магніту разом з валом датчика в стержнях обмотки кільця наводиться ЕДС і з'являється струм. Внаслідок цього кільце повертається у бік обертання магніту і пов'язаний з кільцем штовхач замикає або розмикає електромагніти. Такий датчик призначений для швидкостей обертання від 930 до 3000 об/хв.
Тахогенератор (рис. 1.8) представляє машину постійного струму з незмінним по величині магнітним потоком. Ротор приєднується до валу, швидкість якого контролюється. Електрорушійна сила тахогенератору пропорційна швидкості обертання ротора. Тахогенератор приєднується до проміжного реле Р, яке спрацьовує при певній швидкості обертання ротора тахогенератора. Зміною опору R можна міняти величину швидкості ротора, при якій спрацьовує проміжне реле.
Відцентровий швидкісний датчик заснований на розсовуванні під дією відцентрової сили вантажів, що обертаються. При певній швидкості обертання ці вантажі впливають на контакти і замикають або розмикають їх.
1.7 Електроустаткування токарних верстатів
1.7.1 Асинхронний електродвигун
Електропривод металорізних верстатів перетворює електричну енергію в механічну. Розрізняють привод головного руху, привод подачі і т.д. В електроприводі застосовують двигуни змінного і постійного струму, частіше асинхронні двигуни змінного трифазного струму з короткозамкненим ротором, який з'єднується безпосередньо або через пасову передачу з коробкою передач.
Асинхронні двигуни можуть бути з однією або двома швидкостями обертання (наприклад, 3000/1500, 1500/750). Для безступінчастого регулювання швидкості обертання органів верстата застосовують асинхронні двигуни з незалежним збудженням і двигуни постійного струму, які дозволяють змінювати частоту обертання в діапазоні 10:1.
До складу електроприводу окрім електродвигуна і виконавчих органів верстата, з якими сполучений електродвигун, входять апаратура управління двигуном, системи приладів електровимірювань, електричні ланцюги, апаратура захисту й ін.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.