|
i |
|
|
|
|
|
|
|
|
|
|
0 |
2500 |
147,15 |
196,2 |
98,1 |
|||||
|
1 |
2500 |
147,15 |
196,2 |
98,1 |
|||||
|
2 |
2500 |
- 44 |
147,15 |
6 |
196,2 |
10 |
98,1 |
-6 |
-260,939 |
|
3-7 |
– |
– |
– |
– |
– |
– |
– |
– |
– |
|
8 |
0 |
-32 |
147,15 |
3 |
196,2 |
-2 |
98,1 |
3 |
1,294 |
|
9-12 |
– |
– |
– |
– |
– |
– |
– |
– |
– |
По данным табл. 6.1 строится диаграмма приведенного момента сопротивления. Примем масштаб оси ординат
Масштаб оси абсцисс μj
![]() , где l – отрезок оси абсцисс, соответствующий одному циклу
движения механизма, мм.
, где l – отрезок оси абсцисс, соответствующий одному циклу
движения механизма, мм.
6.3.5. Построение диаграммы работ сил сопротивления и движущих сил
Путем графического интегрирования диаграммы
приведенного момента сопротивлений строится диаграмма работ сил сопротивления ![]() (рис.
6.13).
(рис.
6.13).
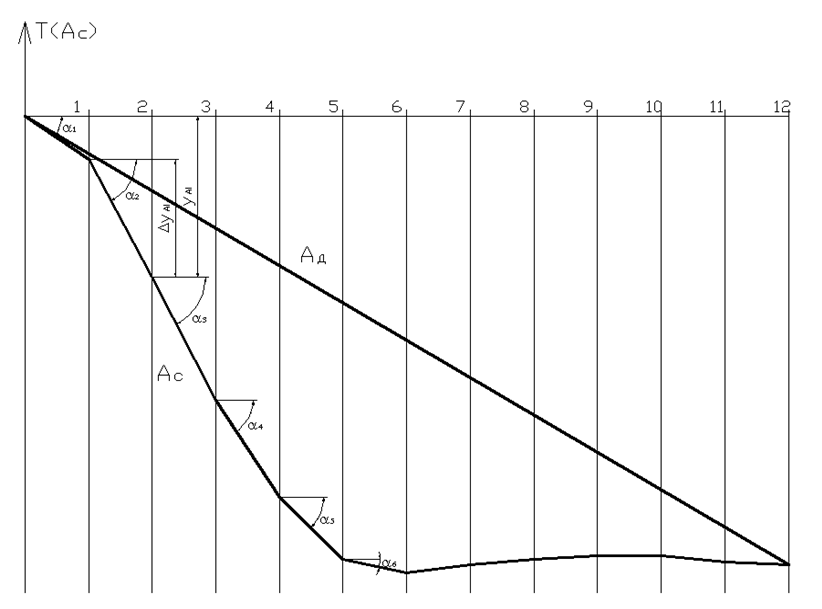
Рис. 6.13. Диаграмма работ сил сопротивления и движущих сил, μT(A)=3,386 Нм/мм
При графическом интегрировании график подынтегральной
функции вычерчивается в масштабе по осям координат. В рассматриваемом случае
это будет ![]() –
масштаб приведенного момента сил сопротивления, Н·м/мм;
–
масштаб приведенного момента сил сопротивления, Н·м/мм; ![]() –
масштаб угла поворота звена приведения, рад/мм. Следовательно, ордината
–
масштаб угла поворота звена приведения, рад/мм. Следовательно, ордината ![]() и
абсцисса
и
абсцисса ![]() ,
измеряемые на графике в мм, связаны с физическими величинами следующими
соотношениями:
,
измеряемые на графике в мм, связаны с физическими величинами следующими
соотношениями:
 ,
,
 , где
, где ![]() .
.
Угол поворота ![]() делится
на 12 равных интервалов
делится
на 12 равных интервалов ![]() ,
при этом
,
при этом  ,
где
,
где ![]() .
.
В
пределах каждого интервала ![]() подынтегральную
функцию определяют с помощью равновеликого по площади прямоугольника, заменяющего
на данном интервале криволинейную трапецию. Среднее значение ординаты
подынтегральную
функцию определяют с помощью равновеликого по площади прямоугольника, заменяющего
на данном интервале криволинейную трапецию. Среднее значение ординаты ![]() на
данном интервале соответствует среднему значению суммарного приведенного
момента
на
данном интервале соответствует среднему значению суммарного приведенного
момента ![]() :
:
 ,
где
,
где ![]() .
Выравнивание площадей прямоугольника и криволинейной трапеции соответствует
соотношению
.
Выравнивание площадей прямоугольника и криволинейной трапеции соответствует
соотношению
 .
.
Отрезки
![]() проецируются
на ось ординат, и полученные точки соединяются с началом отрезка H интегрирования, конец которого совмещен с началом
координат заданного графика. Длина отрезка H
определяет масштаб графика и выбирается с учетом формата для построений.
проецируются
на ось ординат, и полученные точки соединяются с началом отрезка H интегрирования, конец которого совмещен с началом
координат заданного графика. Длина отрезка H
определяет масштаб графика и выбирается с учетом формата для построений.
На рис. 6.12 длина отрезка H принята 50 мм.
![]() .
.
Такое
построение образует ряд лучей, выходящих из начала O
отрезка интегрирования и наклоненных под углами ![]() к
положительному направлению оси абсцисс. Эти углы могут быть положительными и
отрицательными.
к
положительному направлению оси абсцисс. Эти углы могут быть положительными и
отрицательными.
Для
произвольного выбранного луча  .
Для первого интервала (от позиции 0 до 1)
.
Для первого интервала (от позиции 0 до 1)  .
Для построения искомого графика интегральной зависимости выбирают начало
координат
.
Для построения искомого графика интегральной зависимости выбирают начало
координат ![]() (рис.
6.13), j
и проводят последовательно лучи под углами
(рис.
6.13), j
и проводят последовательно лучи под углами ![]() ,
каждый из которых соответствует определенному интервалу j1 – для 1–2, ji
– для i…(i+1).
,
каждый из которых соответствует определенному интервалу j1 – для 1–2, ji
– для i…(i+1).
Принятое построение соответствует соотношениям
 ;
;
 .
.
Так
как углы наклона лучей одинаковы, то записывается равенство правых частей  .
После подстановки получают
.
После подстановки получают

Следовательно,
принятая система построений обеспечила получение отрезка ![]() ,
пропорционального значению интеграла
,
пропорционального значению интеграла ![]() в
заданных пределах изменения угла j1. При этом построении имеет
место определенная зависимость между масштабами
в
заданных пределах изменения угла j1. При этом построении имеет
место определенная зависимость между масштабами  ,
где
,
где ![]() ,
,
![]() .
.
После нахождения отдельных значений искомой функции в конце интервалов, полученные точки аппроксимируют плавной кривой. При нулевых значениях подынтегральной функции искомая функция имеет максимальные или минимальные значения.
Диаграмма работы движущих сил ![]() для
рабочих машин, с учетом принятых выше допущений, получается в виде прямой
линии, соединяющей начало и конец графика работы, построенного ранее. Графически дифференцируя полученную линейную
зависимость, находим
для
рабочих машин, с учетом принятых выше допущений, получается в виде прямой
линии, соединяющей начало и конец графика работы, построенного ранее. Графически дифференцируя полученную линейную
зависимость, находим ![]() в
системе координат
в
системе координат ![]() .
.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.