5) на
основании ранее построенных графиков ![]() и
Jп(j)
строим диаграмму «энергомасс» ΔТ(Jп).
Диаграмма «энергомасс» строится графическим исключением параметра j из диаграмм
и
Jп(j)
строим диаграмму «энергомасс» ΔТ(Jп).
Диаграмма «энергомасс» строится графическим исключением параметра j из диаграмм ![]() и
Jп(j)
(рис. 6.14,в).
и
Jп(j)
(рис. 6.14,в).
Построение
графика «энергомасс» выполнено с помощью прямой, наклоненной под углом 45°. На
эту прямую горизонтальными линиями переносят ординаты точек кривой ![]() .
Через полученные точки на этой прямой проводят вертикальные линии, на которых
находят точки пересечения с горизонтальными прямыми, проведенными через
соответствующие точки графика приведенного момента инерции Jп(j) группы звеньев.
.
Через полученные точки на этой прямой проводят вертикальные линии, на которых
находят точки пересечения с горизонтальными прямыми, проведенными через
соответствующие точки графика приведенного момента инерции Jп(j) группы звеньев.
Находим координатные оси новой системы, в которой диаграмма «энергомасс» соответствует механизму с заданным коэффициентом неравномерности δ = 0,03 при средней угловой скорости ωп=15 рад/с. К кривой диаграммы проводятся касательные под углами ψmax и ψmin, соответствующие максимальной и минимальной угловым скоростям звена приведения с маховиком. Для этого находим тангенсы максимального и минимального углов наклона касательных к диаграмме «энергомасс»:
 ,
,
![]() ,
,
 ,
,
![]() .
.
Для проведения касательных углы ymax и ymin не вычисляются, так как удобнее пользоваться их тангенсами путем построения прямоугольных треугольников с известным соотношением катетов. Проведя касательные под вычисленными углами к диаграмме «энергомасс» находим точку их пересечения.
Точка пересечения
касательных является искомым центром координат. Если начало координат находится
вне чертежа, то используют отрезок ![]() ,
отсекаемый касательными на оси кинетических энергий
,
отсекаемый касательными на оси кинетических энергий ![]() .
Из чертежа видно как определяется длина отрезка
.
Из чертежа видно как определяется длина отрезка ![]() .
Этот отрезок изображает в масштабе
.
Этот отрезок изображает в масштабе ![]() наибольшее
изменение кинетической энергии маховика в течение периода его установившегося
движения.
наибольшее
изменение кинетической энергии маховика в течение периода его установившегося
движения.
![]()
![]() ,
,
![]() ,
,
![]() ,
,
![]() находится
измерением,
находится
измерением,
![]() .
.
По чертежу ![]() ,
тогда
,
тогда ![]() .
На основании этой формулы момент инерции маховика, установленного на валу звена
приведения (кривошипа), будет
.
На основании этой формулы момент инерции маховика, установленного на валу звена
приведения (кривошипа), будет
 .
.
6.4.3. Определение момента инерции методом Е.М. Гутьяра
Последовательность выполнения в пп. 1–4 совпадает с последовательностью, описанной для способа Мерцалова – Рериха (6.4.1).
Одну под другой
строят диаграммы ![]() и
Jп(j)
(рис. 6.14, а, б). Вычитая из «избыточной» энергии механизма ΔТ
максимальную и минимальную энергию звеньев, получают две диаграммы кинетических
энергий маховика
и
Jп(j)
(рис. 6.14, а, б). Вычитая из «избыточной» энергии механизма ΔТ
максимальную и минимальную энергию звеньев, получают две диаграммы кинетических
энергий маховика ![]() и
и
![]() (рис.
6.16).
(рис.
6.16).
Значения
ординат диаграмм ![]() и
и
![]() для
второго положения механизма определяется следующим образом:
для
второго положения механизма определяется следующим образом:
![]() ,
,
![]() , где
, где  ;
;
 ;
;
![]() ;
;
![]() .
.
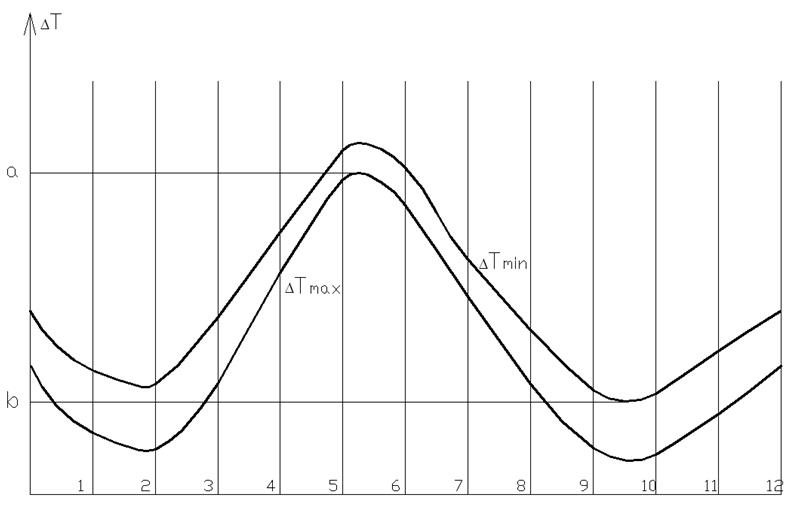
Рис. 6.16. Диаграмма максимального и минимального изменения кинетической энергии маховика, μΔTм = 3,0076 Нм/мм
Полученные данные заносят в табл. 6.4.
Таблица 6.4
Результаты определения приращения кинетической энергии
|
i |
|
|
k1 |
k2 |
|
|
|
0 |
0 |
142,21 |
0,7604 |
0,7161 |
-366,20 |
-344,88 |
|
– |
– |
– |
– |
– |
– |
– |
|
2 |
28 |
185,42 |
0,7604 |
0,7161 |
-382,59 |
-354,79 |
|
3-12 |
– |
– |
– |
– |
– |
– |
По
вычисленным значениям ![]() и
и
![]() строится
диаграмма в масштабе
строится
диаграмма в масштабе
![]() .
.
Проводим
горизонтальные прямые, касающиеся первой кривой в т. a
наибольшего максимума, второй кривой в т. b
наименьшего минимума. Прямые отсекают на оси ординат отрезок ![]() .
.
![]() .
.
Момент инерции маховика подсчитывается по формуле
 .
.
6.5. Габаритные размеры и масса маховика
![]() Момент инерции маховика и его масса зависят от его местоположения в
кинематической цепи механизма. Чем выше частота вращения вала, на котором
установлен маховик, тем меньше его размеры при вычисленном моменте инерции Jп группы звеньев, обеспечивающем движение
начального звена с номинальной средней угловой скоростью и заданным коэффициентом
неравномерности движения δ.
Момент инерции маховика и его масса зависят от его местоположения в
кинематической цепи механизма. Чем выше частота вращения вала, на котором
установлен маховик, тем меньше его размеры при вычисленном моменте инерции Jп группы звеньев, обеспечивающем движение
начального звена с номинальной средней угловой скоростью и заданным коэффициентом
неравномерности движения δ.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.