Маховик выполняется в форме колеса со спицами со средним диаметром Dср и шириной b (рис. 6.17). Предполагая, что масса обода mоб равномерно распределена по окружности среднего диаметра обода Dср, можно использовать формулу для определения момента инерции тонкого кольца
 ,
(6.61)
,
(6.61)
где ![]() – масса обода, кг; ρ – плотность,
кг/м3;
– масса обода, кг; ρ – плотность,
кг/м3; ![]() ;
;  ;
;
![]() ;
;
 .
.
Подставляя эти формулы в выражение (6.61), можно найти средний диаметр обода
 .
(6.62)
.
(6.62)
Для стальных маховиков можно принять ρ = 7800 кг/м3, для чугунных – 7100 кг/м3.
Определим
средний диаметр обода. Пусть ρ = 7800 кг/м3. Выберем
ψb = 0,2,
тогда b = 0,2Dср, h = 0,1Dср. Примем ![]() –
среднее значение по трем методам определения момента инерции маховика. Найдем
средний диаметр обода
–
среднее значение по трем методам определения момента инерции маховика. Найдем
средний диаметр обода
 .
.
![]() ,
,
![]() .
.
6.6. Определение угловой скорости звена приведения
после установки маховика
При кинематическом
исследовании машины предполагалось, что главный вал вращается равномерно с
угловой скоростью ![]() .
В действительности угловая скорость ω главного вала является переменной
величиной.
.
В действительности угловая скорость ω главного вала является переменной
величиной.
Зная момент инерции маховика, а также то положение машины, в котором ω = ωmax, либо ω = ωmin, можно определить значения угловой скорости главного вала для любых положений машины внутри периода установившегося движения.
Истинная угловая скорость вычисляется по формуле
 . (6.63)
. (6.63)
Последовательность выполнения работы:
1. Пользуясь
диаграммой ![]() (см.
рис. 6.14), определяем значение
(см.
рис. 6.14), определяем значение ![]() для
положения машины, в котором ω = ωmax,
а также значения ΔT для ряда положений машины
внутри периода установившегося движения. На рис. 6.11 ординаты, измеряющие
величину ΔT1 на диаграммах
для
положения машины, в котором ω = ωmax,
а также значения ΔT для ряда положений машины
внутри периода установившегося движения. На рис. 6.11 ординаты, измеряющие
величину ΔT1 на диаграммах ![]() ,
соответствуют абсциссам OA.
,
соответствуют абсциссам OA.
2. Подсчитываем
ряд значений Jп для тех положений
машины, для которых подсчитаны ΔT в п. 6.3.6.
Можно также использовать те значения Jп,
которые ранее были определены при подсчете ![]() (способ
Мерцалова-Рериха) или значений
(способ
Мерцалова-Рериха) или значений ![]() и
и
![]() (способ
Гутьяра).
(способ
Гутьяра).
3. Определяем значения ω для тех же положений по формуле
 , где ωi
– истинная угловая скорость кривошипа в i
положении; Jм – момент инерции
маховика; Jп2 – приведенный момент
инерции звеньев механизма в положении, соответствующем максимальной угловой
скорости (в нашем случае – положение 2); Jпi – приведенный момент инерции в положении i (берем по данным табл. 6.5); ωmax
– максимальная угловая скорость кривошипа, определяемая по формуле
, где ωi
– истинная угловая скорость кривошипа в i
положении; Jм – момент инерции
маховика; Jп2 – приведенный момент
инерции звеньев механизма в положении, соответствующем максимальной угловой
скорости (в нашем случае – положение 2); Jпi – приведенный момент инерции в положении i (берем по данным табл. 6.5); ωmax
– максимальная угловая скорость кривошипа, определяемая по формуле  ;
ΔT5 – приращение кинетической энергии
всей машины, соответствующей максимальной угловой скорости кривошипа
;
ΔT5 – приращение кинетической энергии
всей машины, соответствующей максимальной угловой скорости кривошипа ![]() ;
y5 – ордината диаграммы
;
y5 – ордината диаграммы ![]() ,
соответствующая ΔT5 (ордината в положении
5); μT – масштаб оси ординат
диаграммы
,
соответствующая ΔT5 (ордината в положении
5); μT – масштаб оси ординат
диаграммы ![]() (μT=3,386 Нм/мм); ΔTi
– величина приращения кинетической энергии в i
положении, равная
(μT=3,386 Нм/мм); ΔTi
– величина приращения кинетической энергии в i
положении, равная ![]() ;
yi – ордината диаграммы (табл. 6.5).
;
yi – ордината диаграммы (табл. 6.5).
4. По
значениям истинной угловой скорости строим диаграмму изменения угловой скорости
кривошипа ![]() за
период установившегося движения в масштабе
за
период установившегося движения в масштабе ![]() ,
,
![]() .
Вычислим угловую скорость в положении 2.
.
Вычислим угловую скорость в положении 2.
 .
.
Полученные результаты заносим в табл. 6.5.
Таблица 6.5
Величины угловых скоростей кривошипа
|
i |
Jм, кг·м2 |
Jпmax, кг·м2 |
Jпi, кг·м2 |
ωmax, рад/с |
ΔTmax, Н·м |
ΔTi, Н·м |
ωi, рад/с |
|
0-1 |
– |
– |
– |
– |
– |
– |
– |
|
2 |
48,55 |
4,12 |
4,12 |
15,45 |
291,19 |
94,81 |
15,21 |
|
3-12 |
– |
– |
– |
– |
– |
– |
– |
По данным табл. 6.5 построим диаграмму изменения угловой скорости (рис. 6.18).
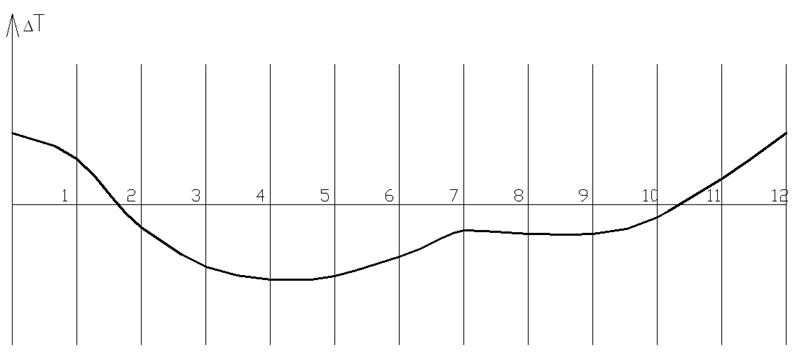
Рис. 6.18. Диаграмма изменения угловой скорости кривошипа, μω=3,386 Нм/мм
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.