На траектории движения точки A отмечаем крайние положения A0 и A5, которые соответствуют крайним положениям механизма.
Крайними положениями механизма называются положения, где скорость выходного звена (ползуна D) равна нулю.
Крайними положениями исследуемого механизма с вращательным движением начального звена могут быть такие положения, когда кривошип и шатун то вытягиваются, то складываются в одну линию. Для кулисного механизма с качающейся кулисой крайними могут являться такие положения, когда кривошип и кулиса взаимно перпендикулярны.
Начиная от точки A0 – начала рабочего хода ползуна D – окружность радиуса OA делим на 12 равных частей. Точки деления обозначаем A1, A2, A3 и т.д. в направлении вращения кривошипа.
Определяем начальное и конечное положение
выходного звена (ползуна D). Строим над траекторией движения ползуна
график действия сил полезного сопротивления. По заданному графику сил полезного
сопротивления и величине силы ![]() на
листе строим график силы в функции положения ползуна
на
листе строим график силы в функции положения ползуна ![]() ,
согласовав абсциссу с ходом Hп
ползуна на кинематической схеме, вычерченной в масштабе длины
,
согласовав абсциссу с ходом Hп
ползуна на кинематической схеме, вычерченной в масштабе длины ![]() .
Подобное построение позволяет перенести на график разметку траектории ползуна
и найти значение силы полезного сопротивления в каждой фиксированной позиции
механизма.
.
Подобное построение позволяет перенести на график разметку траектории ползуна
и найти значение силы полезного сопротивления в каждой фиксированной позиции
механизма.
6.3.3. Построение плана скоростей для каждого из 12 положений
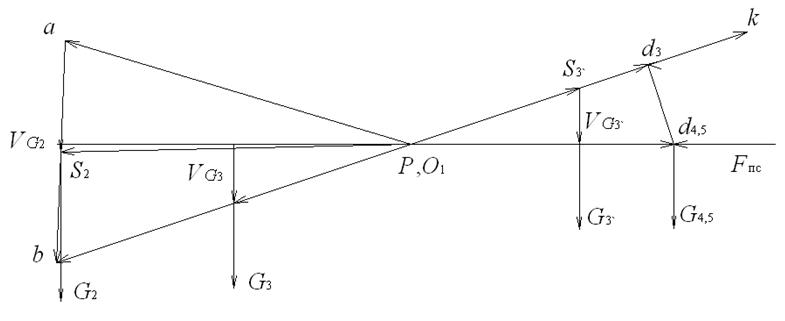
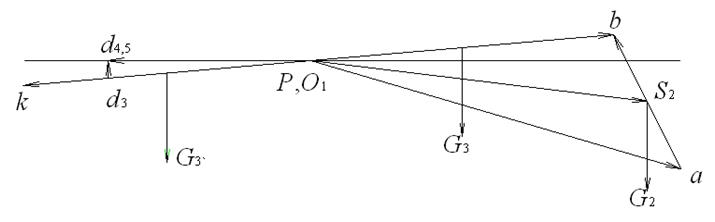
Начинаем построение плана скоростей с входного звена (рис. 6.11).
Если начальное звено механизма совершает вращательное движение, то скорость его любой точки, например A, определяется по формуле
![]() ,
, ![]() (6.53)
(6.53)
где ![]() –
скорость точки A, м/с;
–
скорость точки A, м/с; ![]() –
кратчайшее расстояние от оси вращения до точки A,
м;
–
кратчайшее расстояние от оси вращения до точки A,
м; ![]() –
угловая скорость звена OA, рад/с.
–
угловая скорость звена OA, рад/с.
|
|
|
а) |
|
|
|
б) |
|
Рис. 6.11. План скоростей, μl = 0,036 м/с·мм: а – для второго положении; б – для восьмого положения |
Скорость точки A перпендикулярна прямой OA
(![]() )
и может быть изображена на плане скоростей вектором
)
и может быть изображена на плане скоростей вектором ![]() ,
модуль которого будет
,
модуль которого будет  ,
где масштабный коэффициент скорости
,
где масштабный коэффициент скорости
 ,
(6.54)
,
(6.54)
где p – полюс плана скоростей; a – одноименная точка на звене.
Выбрав длину ![]() такой,
чтобы длина наименьшего вектора плана скоростей могла быть измерена с
погрешностью не более 5%, найдем масштабный коэффициент плана скоростей
такой,
чтобы длина наименьшего вектора плана скоростей могла быть измерена с
погрешностью не более 5%, найдем масштабный коэффициент плана скоростей  .
Рекомендуемая длина вектора
.
Рекомендуемая длина вектора ![]() -
50–100 мм.
-
50–100 мм.
Для определения скорости точки B раскладываем плоскопараллельное движение звена 2 на переносное (поступательное вместе с т. A) и относительное (вращательное вокруг т. А). С другой стороны, т. В находится в относительном движении вокруг неподвижной т. О1. Поэтому необходимо записать два векторных уравнения, графическое решение которых дает искомую скорость:
![]() , где
, где ![]() –
переносная скорость, ее вектор изображен на плане;
–
переносная скорость, ее вектор изображен на плане; ![]() –
относительная скорость, ее вектор перпендикулярен звену АВ.
–
относительная скорость, ее вектор перпендикулярен звену АВ.
![]() , где
, где ![]() –
переносная скорость точки О1, принадлежащей неподвижной стойке
(
–
переносная скорость точки О1, принадлежащей неподвижной стойке
(![]() );
);
![]() –
относительная скорость, ее вектор перпендикулярен звену ВО1.
–
относительная скорость, ее вектор перпендикулярен звену ВО1.
Эту систему из двух
уравнений решаем графически. Через т. А проводим линию, перпендикулярную
АВ, а через полюс р – линию, перпендикулярную ВО1,
до их пересечения в т. В. Векторы![]() и
и
![]() изображают
искомые скорости
изображают
искомые скорости ![]() и
и
![]() .
.
Следует заметить, что
направление вектора относительной скорости на плане не соответствует
последовательности букв в индексе обозначения относительной скорости. Например,
вектор ![]() направлен не от точки «b» к точке «а»,
а в противоположном направлении, согласно векторному уравнению
направлен не от точки «b» к точке «а»,
а в противоположном направлении, согласно векторному уравнению ![]() ,
т. е.
,
т. е. ![]() .
.
Скорость точки D3 звена 3 определяем, используя теорему подобия. Точка на плане делит вектор-отрезок в таком же отношении, как соответствующая точка делит звено механизма.
 ,
,
 ,
откуда
,
откуда

Скорость т. K, принадлежащей кулисе,
 , следовательно
, следовательно 
где ![]() –
размеры звена, измеренные по чертежу, мм.
–
размеры звена, измеренные по чертежу, мм.
Отрезок pd3 откладываем
от полюса р на продолжении отрезка ![]() ,
так как обе точки находятся на одном звене и вращаются вокруг неподвижной
т. О1.
,
так как обе точки находятся на одном звене и вращаются вокруг неподвижной
т. О1.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.