В процессе проектирования машины определяются все параметры ее звеньев, позволяющие подсчитать значение приведенного момента инерции Jп для всех положений машины. Однако этот момент инерции часто оказывается недостаточным для обеспечения (при заданном значении ωср) границ колебания угловой скорости ω главного вала, заданных коэффициентом δ. В этом случае возникает задача подбора дополнительно маховика с таким моментом инерции Jм, при котором эти границы обеспечиваются.
Для определения момента инерции маховика применяют способы Н.И. Мерцалова и К. Э. Рериха, метод Е. М. Гутьяра или Ф. Виттенбауэра.
Рассматриваемый механизм имеет степень подвижности, равную единице, поэтому положение механизма задается одним параметром. В качестве такого параметра выберем угол поворота главного вала машины j, отсчитанный от крайнего положения.
6.2.1. Метод Ф. Виттенбауэра
Метод Ф. Виттенбауэра основан на
применении диаграммы «энергомасс». Для ее построении сначала строят графики Jп(j) и ΔТ(j).
Затем строят диаграмму ΔТ(ΔJп).
Построение этой диаграммы по графикам функций Jп(j) и ΔТ(j)
производят исключением параметра j. Вертикальная ось новой системы координат представляет собой
кинетическую энергию Т механизма, горизонтальная – приведенный момент
инерции Jп. Кривая ΔТ(ΔJп) должна иметь замкнутый вид, так как она построена
для установившегося режима. Кинетическая энергия всего механизма ![]() .
Приведенный момент инерции
.
Приведенный момент инерции ![]() . Величины начальной кинетической
энергии Т0 механизма и момента инерции Jм маховика неизвестны. Поэтому на характер кривых Jп(j) и ΔТ(j)
они не влияют.
. Величины начальной кинетической
энергии Т0 механизма и момента инерции Jм маховика неизвестны. Поэтому на характер кривых Jп(j) и ΔТ(j)
они не влияют.
Диаграмма ![]() полной кинетической энергии механизма
Т в функции полного приведенного момента инерции Jп отличается от диаграммы
полной кинетической энергии механизма
Т в функции полного приведенного момента инерции Jп отличается от диаграммы ![]() только положением начала
координат
только положением начала
координат ![]() . При этом точка
. При этом точка ![]() должна быть смещена относительно
точки O вниз на расстояние, соответствующее
должна быть смещена относительно
точки O вниз на расстояние, соответствующее ![]() , и влево на расстояние,
соответствующее
, и влево на расстояние,
соответствующее ![]() . Получили новую систему координат [T, Jп] с новым началом координат
. Получили новую систему координат [T, Jп] с новым началом координат ![]() .
.
Замкнутая кривая ![]() относительно этой новой системы
будет диаграммой энергомасс, построенной для установившегося режима. Соединим любую
точку кривой энергомасс с началом координат
относительно этой новой системы
будет диаграммой энергомасс, построенной для установившегося режима. Соединим любую
точку кривой энергомасс с началом координат ![]() и отметим угол ψ.
и отметим угол ψ.
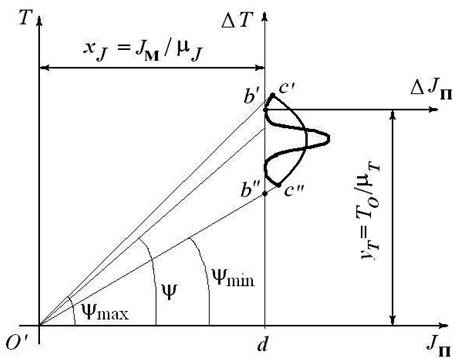
Из рис. 6.6 следует, что произвольной точке диаграммы энергомасс соответствует определенный угол наклона прямой, проведенной из начала координат в эту точку
 (6.18)
(6.18)
где ![]() – масштабные коэффициенты моментов
инерции и кинетических энергий, кг·м2/мм, Н·м/мм.
– масштабные коэффициенты моментов
инерции и кинетических энергий, кг·м2/мм, Н·м/мм.
|
|
|
|
а) |
б) |
|
Рис. 6.6. Диаграмма энергомасс |
|
Так
как  , то можно записать
, то можно записать  или
или  , т.е. каждому углу наклона прямой, соединяющей
произвольную точку диаграммы с началом координат, соответствует определенная
угловая скорость звена приведения или каждому значению угловой скорости звена
приведения соответствует определенный угол наклона прямой, проведенной из
начала координат через соответствующую точку диаграммы.
, т.е. каждому углу наклона прямой, соединяющей
произвольную точку диаграммы с началом координат, соответствует определенная
угловая скорость звена приведения или каждому значению угловой скорости звена
приведения соответствует определенный угол наклона прямой, проведенной из
начала координат через соответствующую точку диаграммы.
Максимальному и минимальному углам наклона касательных соответствует максимальная и минимальная угловые скорости звена приведения:
 ;
;  (6.19)
(6.19)
Такие скорости возникают в механизме без маховика. Коэффициент неравномерности в этом случае не равен заданному.
Можно найти угловые скорости ωmax и ωmin через заданный коэффициент неравномерности δ (6.3) и определить соответствующие углы наклона касательных к диаграмме энергомасс.
Получим
 ;
;  . (6.20)
. (6.20)
Пусть
диаграмма ΔТ(Δ Jп) построена. Поскольку величины T0 и Jм неизвестны, то осей Jп и T
провести нельзя. Чтобы определить их положение, пользуясь формулами (6.20)
подсчитываем по заданным величинам ωср и δ значения ψmax и ψmin, а затем под этими углами проводим лучи, касательные к замкнутой
кривой ΔТ(Δ J). В точке
их пересечения находится начало координат ![]() . Определив его и измерив отрезок
. Определив его и измерив отрезок ![]() , подсчитаем искомый момент инерции маховика
, подсчитаем искомый момент инерции маховика
![]() (6.21)
(6.21)
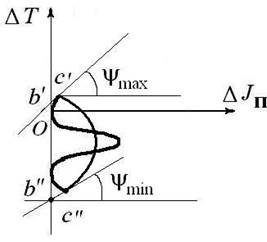
Величины
углов ψmax и ψmin весьма близки друг к другу, поэтому точка их пересечения (начало
координат) получается столь удаленной от диаграммы ΔТ(Δ Jп), что не помещается в пределах чертежа. В связи с этим
момент инерции Jм нужно находить не по отрезку ![]() , а по отрезку
, а по отрезку ![]() , отсекаемому лучами на оси ΔТ. Из рис. 6.6, б
, отсекаемому лучами на оси ΔТ. Из рис. 6.6, б
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.