![]() ,
, ![]()
![]()
Подставляя в это равенство из формул (6.20) значения tgψmax и tgψmin и пользуясь формулой (6.21), определяем величину Jм приведенного момента инерции маховика
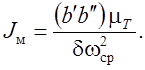 (6.22)
(6.22)
Таким образом, для
подсчета Jм не нужно искать начало
координат ![]() и
отрезок
и
отрезок ![]() ,
достаточно определить отрезок
,
достаточно определить отрезок ![]() .
Отрезок
.
Отрезок ![]() представляет
собой наибольший перепад кинетической энергии маховика в масштабе μТ
представляет
собой наибольший перепад кинетической энергии маховика в масштабе μТ
![]() .
Выражение (6.22) примет вид
.
Выражение (6.22) примет вид
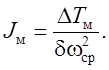 (6.23)
(6.23)
Изложенное позволяет заключить, что положение оси Jп никак не влияет на величину момента инерции маховика Jм, поэтому начальное значение кинетической энергии Т0 вычислять не требуется. То есть начало диаграммы энергомасс ΔТ(ΔJп) совпадает с началом координат в точке О.
6.2.2. Способ Н. И. Мерцалова и К. Э. Рериха
Способ Н. И. Мерцалова и К. Э. Рериха основан на определении кинетической энергии всех звеньев механизма и последующем выделении из этой кинетической энергии той ее части, которая приходится только на звено приведения и на звенья, связанные с ним постоянным передаточным числом. После этого легко определить искомое значение наибольшего перепада кинетической энергии ΔТ1 наиб.
Составим выражение кинетической энергии для всего механизма:
 .
.
Обозначим
 ,
,  , (6.24)
, (6.24)
где Т – кинетическая энергия всех звеньев механизма; Тм – кинетическая энергия звеньев механизма, имеющих постоянный приведенный момент инерции (звено приведения и звенья, связанные с ним постоянным передаточным отношением); Тп – кинетическая энергия тех звеньев механизма, приведенный момент инерции которых переменен.
Из уравнения (6.24)
![]() (6.25)
(6.25)
Кинетическую энергию Т выразим из уравнения
![]() , (6.26)
, (6.26)
тогда
![]() . (6.27)
. (6.27)
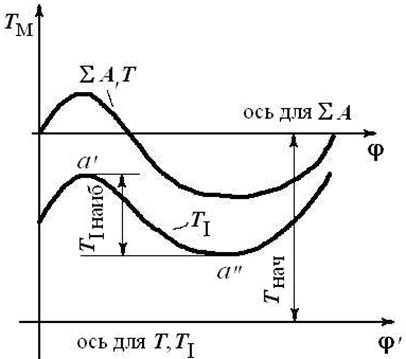
По уравнению (6.27) для одного полного цикла построим диаграмму Тм(j), где j – угол поворота звена приведения, и по этой диаграмме найдем величину ΔТ1 наиб, входящую в расчетную формулу (6.11).
Проиллюстрируем
сказанное графиками. Пусть известны диаграмма ![]() (верхняя
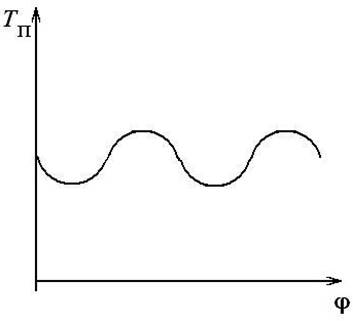
кривая рис. 6.7, а), построенная относительно оси j, и диаграмма Тп(j) (рис. 6.7, б).
(верхняя
кривая рис. 6.7, а), построенная относительно оси j, и диаграмма Тп(j) (рис. 6.7, б).
|
|
|
|
а) |
б) |
|
Рис. 6.7. Диаграмма изменения кинетической энергии |
|
Согласно
уравнению (6.27) прибавим к сумме работ ![]() значение
кинетической энергии Тнач всего механизма в начале цикла. Так
как Тнач является постоянной величиной, то прибавление ее,
сделанное графически, представится перемещением оси j на величину Тнач (рис. 6.7, а). После
указанного перемещения верхняя кривая на рис. 6.7, а будет относительно
сдвинутой оси
значение
кинетической энергии Тнач всего механизма в начале цикла. Так
как Тнач является постоянной величиной, то прибавление ее,
сделанное графически, представится перемещением оси j на величину Тнач (рис. 6.7, а). После
указанного перемещения верхняя кривая на рис. 6.7, а будет относительно
сдвинутой оси ![]() изображать
кинетическую энергию Т всего механизма, как это следует из уравнения
(6.26). Вычтем, согласно уравнению (6.25), из кинетической энергии всего
механизма Т кинетическую энергию Тп, получим нижнюю
кривую на рис. 6.7, а. Нижняя кривая, отнесенная к сдвинутой оси
изображать
кинетическую энергию Т всего механизма, как это следует из уравнения
(6.26). Вычтем, согласно уравнению (6.25), из кинетической энергии всего
механизма Т кинетическую энергию Тп, получим нижнюю
кривую на рис. 6.7, а. Нижняя кривая, отнесенная к сдвинутой оси ![]() и
явится кривой кинетической энергии Тм. Отметим на этой кривой
точку максимума
и
явится кривой кинетической энергии Тм. Отметим на этой кривой
точку максимума ![]() и
точку минимума
и
точку минимума ![]() ,
и по ним определим наибольший
перепад кинетической энергии ΔТ1 наиб, необходимый для
подсчета Jп1 по (6.11).
,
и по ним определим наибольший
перепад кинетической энергии ΔТ1 наиб, необходимый для
подсчета Jп1 по (6.11).
Искомая величина ΔТ1
наиб зависит только от конфигурации кривой Тм. Форма же
кривой Тм определяется исключительно очертаниями графиков ![]() и Тп(j) и не
зависит от значения Тнач. Любое изменение величины Тнач
изменяет лишь расстояние между осями j
и
и Тп(j) и не
зависит от значения Тнач. Любое изменение величины Тнач
изменяет лишь расстояние между осями j
и ![]() ,
но форма кривой Тм, а потому и значение ΔТ1 наиб
при заданных очертаниях кривых
,
но форма кривой Тм, а потому и значение ΔТ1 наиб
при заданных очертаниях кривых ![]() и Тп(j) останутся
без изменения. Отсюда следует, что для определения наибольшего перепада кинетической
энергии ΔТ1 наиб не нужно знать величины Тнач,
т. е. нет необходимости численно выявлять положения сдвинутой оси абсцисс
и Тп(j) останутся
без изменения. Отсюда следует, что для определения наибольшего перепада кинетической
энергии ΔТ1 наиб не нужно знать величины Тнач,
т. е. нет необходимости численно выявлять положения сдвинутой оси абсцисс ![]() .
.
6.2.3. Способ Е. М. Гутьяра
Составим две новые
функции ![]() и
и ![]() в
соответствии с уравнениями
в
соответствии с уравнениями
![]() ,
(6.28)
,
(6.28)
![]() ,
(6.29)
,
(6.29)
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.