Скорость т. D5 – общей для звеньев 4 и 5, находим, раскладывая движение на переносное (вращательно) вместе с т. D3 и относительное (поступательное) по отношению к точке D3. В абсолютном движении точка D5 перемещается вдоль оси x–x.
Поэтому ![]() ,
,
![]() , где
, где ![]() –
переносная скорость, ее вектор изображен на плане;
–
переносная скорость, ее вектор изображен на плане; ![]() –
относительная скорость, ее вектор параллелен звену DO1,
так как ползун D4 относительно кулисы
движется параллельно DO1;
–
относительная скорость, ее вектор параллелен звену DO1,
так как ползун D4 относительно кулисы
движется параллельно DO1; ![]() –
переносная скорость т. D0,
совпадающей с D, но принадлежащей неподвижной
направляющей, следовательно
–
переносная скорость т. D0,
совпадающей с D, но принадлежащей неподвижной
направляющей, следовательно ![]() ;
;
![]() –
относительная скорость точки D, лежащей на ползуне
и точки D0, лежащей на неподвижной
направляющей, ее вектор параллелен направляющей x–x.
–
относительная скорость точки D, лежащей на ползуне
и точки D0, лежащей на неподвижной
направляющей, ее вектор параллелен направляющей x–x.
Через точку d3 проводим линию, параллельную DO1, а через полюс p – линию, параллельную x–x, до пересечения их в точке D4,5. Вектор pd4,5 изображает скорость точки D5.
6.3.4. Построение диаграммы приведенного момента
сопротивления
Для
построения диаграммы приведенного момента сопротивления
(рис. 6.12) ![]() используется
метод возможных перемещений. Согласно этому принципу, если в некотором
положении механической системы с двусторонними идеальными связями приложенные к
ней силы уравновешиваются, то на любом возможном перемещении системы из этого
положения сумма работ задаваемых сил равна нулю.
используется
метод возможных перемещений. Согласно этому принципу, если в некотором
положении механической системы с двусторонними идеальными связями приложенные к
ней силы уравновешиваются, то на любом возможном перемещении системы из этого
положения сумма работ задаваемых сил равна нулю. ![]()
|
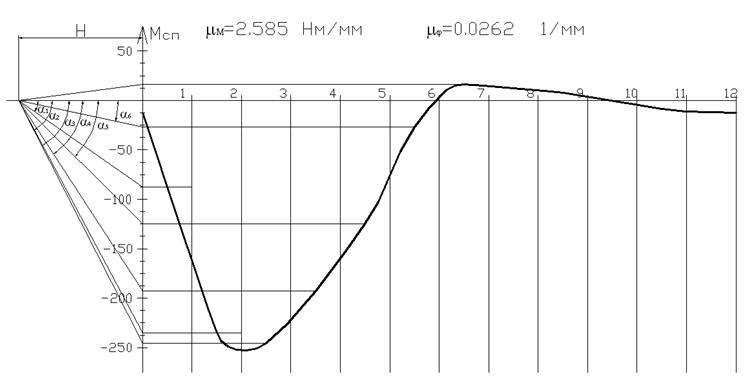
Рис. 6.12. Диаграмма приведенного момента сопротивления,
![]() ,
,
![]()
Направления элементарных возможных перемещений точек механизма совпадают с направлениями скоростей этих точек. Если разделить все работы на время, не равное нулю, то получим условие равенства нулю мгновенных мощностей.
По диаграмме сил сопротивления определяются положения механизма, в которых действует сила Fп.с. На планах скоростей указываются направления активных сил (сил тяжести G) и сил сопротивления Fп.с, инерционные нагрузки не учитываются.
Сила
тяжести ![]() приложена
в центре масс звена, сила полезного сопротивления действует на выходное звено и
направлена противоположно вектору скорости выходного звена. Спроектируем
скорости точек приложения сил на направления этих сил. Проекции скоростей
обозначим индексами тех сил, на направления которых спроектированы векторы
скорости. Например,
приложена
в центре масс звена, сила полезного сопротивления действует на выходное звено и
направлена противоположно вектору скорости выходного звена. Спроектируем
скорости точек приложения сил на направления этих сил. Проекции скоростей
обозначим индексами тех сил, на направления которых спроектированы векторы
скорости. Например, ![]() означает
проекцию скорости V точки приложения силы
означает
проекцию скорости V точки приложения силы ![]() на
направление этой силы. Полученные мощности подставляем в уравнение.
на
направление этой силы. Полученные мощности подставляем в уравнение.
Для каждого из 12 положений механизма определяется величина приведенного момента сопротивления по формуле
 , (6.55)
, (6.55)
где ![]() –
проекции скоростей на направление сил.
–
проекции скоростей на направление сил.
К
рассматриваемому механизму не приложены моменты сил. Инерционные моменты ![]() будут
учтены через приведенный момент инерции
будут
учтены через приведенный момент инерции ![]() .
Формула (6.55) примет вид
.
Формула (6.55) примет вид
 , (6.56)
, (6.56)
где ![]() –
масштаб плана скоростей, м/с·мм;
–
масштаб плана скоростей, м/с·мм; ![]() –
силы, приложенные к механизму, Н;
–
силы, приложенные к механизму, Н; ![]() –
проекция скоростей центра масс звена на направление силы, мм;
–
проекция скоростей центра масс звена на направление силы, мм; ![]() –
угловая скорость звена приведения, с-1.
–
угловая скорость звена приведения, с-1.
Вычислим силы тяжести. Равнодействующие этих сил приложены в центрах масс звеньев, а величины равны:
![]()
![]()
![]()
![]() .
.
Сила ![]() действует
на рабочем ходу ползуна. Рабочий ход ползуна отсчитывается вправо от положения
«0» до положения «5». Знак величин, входящих в формулу, определяется их
направлением. Если направление силы совпадает с направлением скорости точки
приложения силы, то берется знак «плюс», иначе «минус».
действует
на рабочем ходу ползуна. Рабочий ход ползуна отсчитывается вправо от положения
«0» до положения «5». Знак величин, входящих в формулу, определяется их
направлением. Если направление силы совпадает с направлением скорости точки
приложения силы, то берется знак «плюс», иначе «минус».
Вычислим
приведенный момент сопротивления на холостом ходу. В восьмом положении сила
полезного сопротивления не действует, ![]() .
.

Вычислим
приведенный момент инерции на рабочем ходу. Во втором положении действует сила
полезного сопротивления ![]() .
.
 , где
, где ![]() –
сила полезного сопротивления, Н;
–
сила полезного сопротивления, Н; ![]() –
вектор скорости точки, мм;
–
вектор скорости точки, мм; ![]() –
силы тяжести 2, 3, 3’ звеньев, Н;
–
силы тяжести 2, 3, 3’ звеньев, Н; ![]() –
угловая скорость звена приведения, с-1;
–
угловая скорость звена приведения, с-1; ![]() –
проекции скорости центра масс звена на направление силы, мм.
–
проекции скорости центра масс звена на направление силы, мм.
![]()
Сила тяжести кулисы находится на расстоянии ![]() длины
от точки крепления (стойка, т. О1).
длины
от точки крепления (стойка, т. О1).
Значения моментов сопротивления для других положений механизма и данные для их вычисления приведены в табл. 6.1.
Таблица 6.1
Результаты определения приведенного момента сопротивления
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.