Удобно выразить угловые и линейные скорости через длины векторов планов
скоростей. Если приведение выполняется к ведущему звену OA,
тогда: ![]() ,
,
 ,
,
 .
Здесь
.
Здесь ![]() – длина вектора скорости центра масс i-го
звена, мм;
– длина вектора скорости центра масс i-го
звена, мм; ![]() –
угловая скорость i-го звена, с-1;
–
угловая скорость i-го звена, с-1; ![]() –
длина вектора относительной скорости точек K и N, мм;
–
длина вектора относительной скорости точек K и N, мм; ![]() –
длина звена KN, мм;
–
длина звена KN, мм; ![]() –
длина вектора скорости звена точки А, мм;
–
длина вектора скорости звена точки А, мм; ![]() –
истинная длина звена ОА, мм;
–
истинная длина звена ОА, мм; ![]() –
масштаб плана скоростей, м/с·мм.
–
масштаб плана скоростей, м/с·мм.
Теперь выражение для приведенного момента инерции можно записать следующим образом:
 (6.2)
(6.2)
Вычислив ![]() для
ряда последовательных положений механизма за один цикл его движения, полученные
данные заносим в таблицу и по ним строим функции
для
ряда последовательных положений механизма за один цикл его движения, полученные
данные заносим в таблицу и по ним строим функции ![]() .
Начало координат графика размещаем в начале рабочего хода машины (рис. 6.3).
.
Начало координат графика размещаем в начале рабочего хода машины (рис. 6.3).
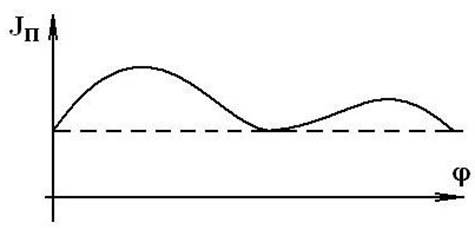
Рис. 6.3. Диаграмма приведенного момента инерции
Приведенный
к главному валу момент инерции машины равен сумме приведенных к главному валу
моментов инерции всех звеньев машины ![]() и
момента инерции маховика
и
момента инерции маховика ![]() :
:
![]() (6.3)
(6.3)
Приведенные моменты
инерции ![]() и
и
![]() являются
периодическими функциями положения машины.
являются
периодическими функциями положения машины.
6.1.3. Приведенный момент сил
Приведение сил и моментов сил, действующих на механизм, осуществляется также при условии эквивалентности динамической модели и механизма (равенства их элементарных работ).
Приведенный
момент сил ![]() –
это пара сил, приложенная к звену приведения и определяемая из равенства
элементарной работы этой пары сил сумме элементарных работ сил и моментов пар
сил, действующих на звенья механизма. Из равенства элементарных работ вытекает
равенство мгновенных мощностей
–
это пара сил, приложенная к звену приведения и определяемая из равенства
элементарной работы этой пары сил сумме элементарных работ сил и моментов пар
сил, действующих на звенья механизма. Из равенства элементарных работ вытекает
равенство мгновенных мощностей
 ,
(6.4)
,
(6.4)
где ![]() –
приведенный момент, приложенный к звену приведения, Н·м;
–
приведенный момент, приложенный к звену приведения, Н·м;
![]() –
сила, приложенная к i-й точке, Н;
–
сила, приложенная к i-й точке, Н; ![]() –
скорость i-й точки, м/с;
–
скорость i-й точки, м/с; ![]() –
угол между направлениями силы
–
угол между направлениями силы ![]() и скорости
и скорости ![]() ;
;
![]() –
момент, приложенный
к i-му звену, Н·м;
–
момент, приложенный
к i-му звену, Н·м; ![]() –
угловая скорость звена приведения, рад/с.
–
угловая скорость звена приведения, рад/с.
Для механизма,
рассматриваемого в курсовом проекте, внешними силами являются: силы тяжести звеньев
![]() ;
сила полезного сопротивления
;
сила полезного сопротивления![]() ;
действующая на рабочем ходу; момент сил сопротивления
;
действующая на рабочем ходу; момент сил сопротивления ![]() (принимают
постоянным). Силы инерции
(принимают
постоянным). Силы инерции ![]() и
моменты сил инерции
и
моменты сил инерции ![]() звеньев
не учитываются, так как рассматривается безмассовый скелет механизма
со всеми приложенными к нему нагрузками. Массы звеньев учитываются при определении
приведенного момента инерции
звеньев
не учитываются, так как рассматривается безмассовый скелет механизма
со всеми приложенными к нему нагрузками. Массы звеньев учитываются при определении
приведенного момента инерции ![]() .
.
Приведенным моментом ![]() может быть как момент сил сопротивления
может быть как момент сил сопротивления ![]() , так и движущий момент
, так и движущий момент ![]() . Для машин-двигателей определяется приведенный
движущий момент
. Для машин-двигателей определяется приведенный
движущий момент ![]() , а момент сопротивления
, а момент сопротивления ![]() принимается постоянным. Для рабочих машин
определяется приведенный момент сопротивления
принимается постоянным. Для рабочих машин
определяется приведенный момент сопротивления ![]() по формуле (6.4), а движущий момент принимается
постоянным
по формуле (6.4), а движущий момент принимается
постоянным ![]() . В курсовом проекте рассматривается рабочая машина.
. В курсовом проекте рассматривается рабочая машина.
Приведенные моменты ![]() вычисляют, используя метод возможных перемещений.
Вычислив
вычисляют, используя метод возможных перемещений.
Вычислив ![]() для ряда последовательных положений механизма за один
цикл его движения, заносят полученные данные в таблицу и по ним строят график
для ряда последовательных положений механизма за один
цикл его движения, заносят полученные данные в таблицу и по ним строят график ![]() (рис. 6.4). Суммарный приведенный момент заменяет собой
все силы и моменты.
(рис. 6.4). Суммарный приведенный момент заменяет собой
все силы и моменты.
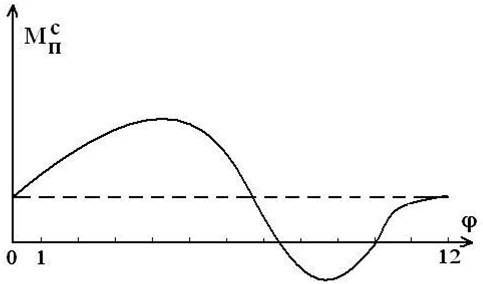
Рис. 6.4. Диаграмма приведенного момента
6.1.4. Кинетическая энергия
Построив динамическую модель исследуемого механизма (рис. 6.2), приступим к её анализу. На основании определения приведенного момента инерции получаем формулы.
Кинетическая энергия всей машины, включая маховик,
![]() .
(6.5)
.
(6.5)
Кинетическая энергия маховика
![]() .
(6.6)
.
(6.6)
Кинетическая энергия всех звеньев машины без маховика
![]() .
(6.7)
.
(6.7)
Очевидно,
![]() .
(6.8)
.
(6.8)
Так как ω, J и Jп – величины переменные, то в уравнениях (6.5) и (6.7) Т и Тп являются функциями двух переменных величин. В отличие от этого, Тм является функцией одной переменной величины, угловой скорости ω, так как Jм – величина постоянная.
Кинетическая энергия звена приведения
![]() (6.9)
(6.9)
откуда может быть найдена скорость звена приведения ωп
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.