В электрических приборах измерительная цепь состоит из измерительного преобразователя, воспринимающего механические колебания и преобразующего их в электрические сигналы, усилителя электрических сигналов (измерительной схемы) и регистрирующего прибора. В качестве измерительного преобразователя параметров вибрации используются акселерометры или устройства, предназначенные для измерения ускорений. Их широкое распространение обусловлено тем, что именно акселерометры обладают наиболее высокими эксплуатационными качествами. Знание же виброускорений позволяет сравнительно просто определить другие кинематические характеристики. Инерционные акселерометры основаны на измерении силы, развиваемой массой при ее движении с ускорением. На рис. 2 схематично показано устройство такого преобразователя.
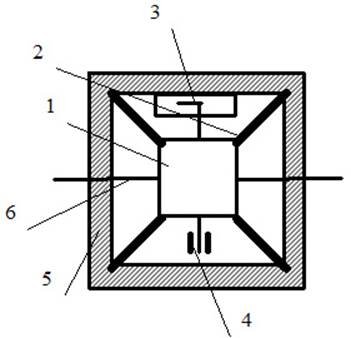 Рис. 2.
Схематичное изображение инерционного акселерометра
Рис. 2.
Схематичное изображение инерционного акселерометра
Масса 1, связанная с корпусом 5 при помощи пружин 2 и демпфера 3, может перемещаться в направлении оси 6, вдоль которой измеряется составляющая ускорения. Перемещение массы пропорционально ускорению и измеряется любым преобразователем перемещений типа индуктивного, фотоэлектрического, емкостного и др. В данном случае нарисован емкостный преобразователь 4.
Так как масса, перемещение которой измеряется, связана с корпусом при помощи пружин и демпфера, то возможны два режима работы акселератора - апериодический и колебательный. Для быстрейшего затухания переходного процесса режим работы должен быть колебательным, но достаточно близким к критическому, при котором колебательный режим переходит к апериодическому. Такому режиму соответствует коэффициент относительного затухания, равный 0,7 - 0,8. Собственная частота колебаний системы должна быть значительно больше, чем максимальная частота изменения измеряемого ускорения, но меньше, чем частота возможных вибраций корпуса акселератора. Диапазон рабочих частот оптимально демпфированных акселерометров находится в пределах от 0 до 60 % частоты их собственных колебаний.
Наибольшее распространение получили пьезоэлектрические акселерометры (рис. 3). Корпус 5 крепится к изучаемому объекту. Силы инерции, действующие на инерционный элемент (груз) 4, воспринимаются пьезоэлементом 1, который может работать как на сжатие (рис. 3, а), так и на сдвиг (рис 3, б). В первом случае груз прижимается к пьезоэлементам при помощи крышки 3 и тарельчатой пружины 2.
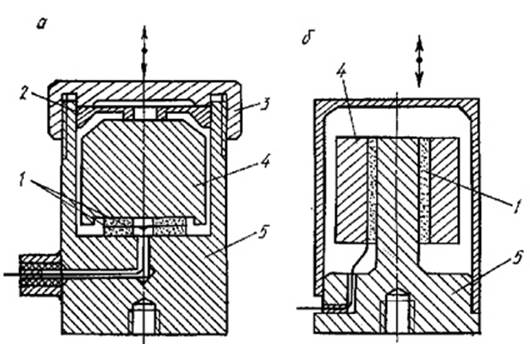 Рис. 3.
Пьезоэлектрические акселерометры
Рис. 3.
Пьезоэлектрические акселерометры
Для уменьшения погрешностей измерения виброускорений высокой частоты необходимо резьбовое крепление акселерометра уплотнять клеем. Кабель следует закреплять, особенно в непосредственной близости от акселерометра. Чрезмерно высокая чувствительность прибора обусловливает увеличение нелинейных искажений. После первичного преобразователя рекомендуется включать фильтр, ограничивающий с обеих сторон рабочий диапазон частот.
Современные акселерометры могут измерять виброускорения от 10–3 до 105 м/с2 в диапазоне частот от 0,5 Гц до 50 кГц. Однако наиболее широко применяют акселерометры, рассчитанные на измерение ускорений до 104 м/с2 с частотами до 10 - 15 кГц. Основная погрешность измерений 2 - 10 %. Масса некоторых акселерометров составляет десятые доли грамма.
В тензорезисторных акселерометрах инерционный элемент изгибает плоскую пружину, а проволочные тензорезисторы, наклеенные на пружину, изменяют свое сопротивление пропорционально ее деформации. Во многих случаях хорошо себя зарекомендовали бесконтактные измерительные преобразователи относительных виброперемещений (рис. 6).
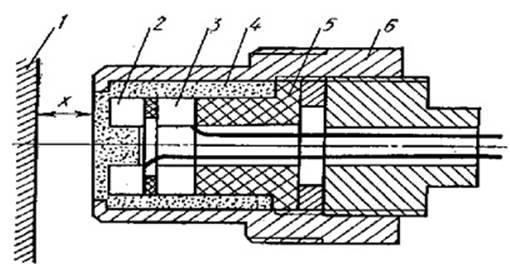 Рис. 6.
Схема бесконтактного вихретокового измерительного преобразователя относительных
виброперемещений
Рис. 6.
Схема бесконтактного вихретокового измерительного преобразователя относительных
виброперемещений
Действие такого преобразователя основано на том, что в находящемся в магнитном поле рабочей катушки 2 токопроводящем колеблющемся теле 1 (объекте измерения) возникают короткозамкнутые (вихревые) токи, отсасывающие энергию поля. Поэтому амплитуда переменного тока в рабочей катушке зависит от расстояния х до колеблющегося тела, электропроводности и магнитных свойств его материала. Катушка 3 установлена для температурной компенсации. Обе катушки изолированы от корпуса 6 изоляционными втулками 4 и 5.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.