Измерение скоростей поступательного движения часто встречает большие трудности, связанные с тем, что перемещающееся тело проходит относительно большой путь и неудобно создавать преобразователь, который бы охватывал весь путь. Поэтому, как правило, преобразователи рассчитаны на измерение скоростей при малых перемещениях.
Так как скорость связана с изменяющимся перемещением, то для ее измерения могут быть использованы преобразователи перемещения, выходной сигнал которых подвергается дифференцированию. При выполнении дифференцирования аналогового сигнала в зависимости от вида сигнала и требуемой точности применяют пассивные дифференцирующие цепи, трансформаторы (ЭДС на вторичной обмотке пропорциональна скорости изменения магнитного потока) и активные дифференциальные цепи (на базе операционных усилителей).
Чаще применяется индукционный преобразователь, выходной сигнал которого пропорционален скорости линейного перемещения. Его принцип действия основан на использовании закона электромагнитной индукции, согласно которому ЭДС, индуцированная в катушке, имеющей w витков, равна
 , где Ф - магнитный поток,
связанный с катушкой.
, где Ф - магнитный поток,
связанный с катушкой.
Основное измерительное уравнение емкостного преобразователя имеет вид
 ,
,
т.е. если изменение емкости пропорционально перемещению пластин конденсатора, то выходной ток пропорционален скорости этого перемещения.
При больших перемещениях и скоростях удобно использовать методы измерения, основанные на эффекте Доплера. Этот эффект заключается в том, что если передатчик, или приемник, или отражатель каких-то колебаний сближается или удаляется со скоростью V, то частота принятого сигнала отличается от частоты излучаемого сигнала на величину, пропорциональную этой скорости:
 , где с – скорость распространения
колебаний в среде; f i- частота излучаемого сигнала; fО-
частота отраженного сигнала.
, где с – скорость распространения
колебаний в среде; f i- частота излучаемого сигнала; fО-
частота отраженного сигнала.
При движении тел в упругих средах, например в воде, для этого могут использоваться акустические колебания. При движении в неупругих средах следует использовать электромагнитные колебания. Следует отметить, что этот метод позволяет определить только скорость сближения тел.
5.8. Измерение характеристик механических колебаний (вибраций)
Под механическими колебаниями в данном случае будем понимать только периодическое изменение во времени параметров движения (перемещение, скорость, ускорение). Различают детерминированные и стохастические колебания. В последнем случае процесс описывается случайной функцией и является следствием случайной совокупности различных причин. Цель измерения характеристик механических колебаний - получение информации об амплитуде, частоте и фазе параметров движения. В случае измерения характеристик стохастических колебаний определяются статистические оценки параметров движения (дисперсия, среднее значение максимальных и минимальных отклонений, вероятность выбросов, корреляционные и спектральные функции). В настоящее время для измерения характеристик вибраций в основном применяют электрические и оптические измерительные приборы, однако находят применение и механические (особенно для измерения относительно низкочастотных вибраций). Принцип действия механических приборов следующий. Колебания объекта измерения 5 (рис. 1) воспринимаются механическим щупом 4 и передаются пишущему перу 2, которое записывает процесс колебаний на движущейся с заданной скоростью ленте 1. Предельная измеряемая частота колебаний зависит от жесткости пружины 3 и приведенной массы щупа 4 с пером 2. Устройство привода ленты находится в корпусе 6. Нижняя предельная измеряемая частота 3 - 5 Гц, а максимальная не превышает 250 Гц.
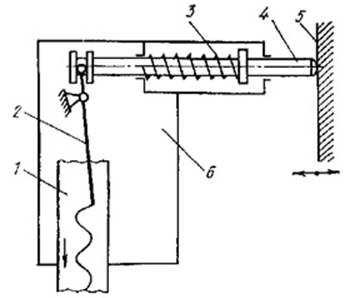 Рис.1.
Схема измерения вибраций механическими приборами
Рис.1.
Схема измерения вибраций механическими приборами
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.