Основним джерелом перешкод в любій електронній схемі являється джерело живлення, яке як передає довготривалі перешкоди від електричної мережі, так і являється самостійним генератором регулярних та випадкових перешкод. Напруга електричних мереж характеризується такими пара-метрами як провали і всплески, перенапруги, раптове відключення, коливання та відхилення відносно номінальних параметрів. Для потужних електронних систем та автономних мереж необхідно враховувати такі явища як несиметрія напруг по фазах, їх спотворення внаслідок роботи нелінійних навантажень та статичних перетворювачів, шо приводить до появи вищих гармонічних складових, а також потужні електромагнітні імпульси, що пов’язані з комутаційними процесами в довгих лініях.
Всі вказані причини неідеальності напруг електричних мереж здебільшого розглядаються як джерела різноманітних перешкод, які з деякою ідеалізацією можуть розглядатись як сума адитивних перешкод. Тобто реальна напруга мережі u(t) представляється як сума ідеальної напруги ui(t) та напруг враховуємих перешкод:
![]() unk (t)
unk (t)
u(t) = ui(t) +![]() unk(t),
(1.13)
unk(t),
(1.13)
де індекс k визначає кількість враховуємих перешкод.
 Так як
сучасні джерела живлення електроних пристроїв будуються на основі
високочастотних перетворювачів електроенергії з забезпеченням необхідного рівня
стабілізації вихідної напруги, то амплітуди вказаних перешкод будуть знижені
компенсаційними стабілізаторами в Кк (Кк
– коефіцієнт зниження амплітуди К-ї перешкоди в вихідній напрузі
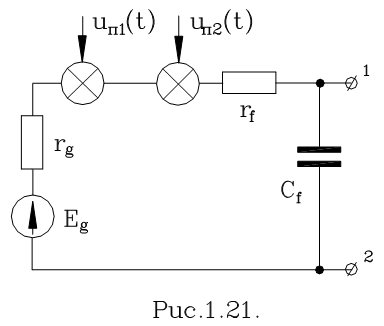
джерела живлення).З деякою ідеалізацією схема заміщення джерела живлення
електронної схеми приводиться на рис.1.21,де rf, Cf – параметри вихідного фільтра.
Так як
сучасні джерела живлення електроних пристроїв будуються на основі
високочастотних перетворювачів електроенергії з забезпеченням необхідного рівня
стабілізації вихідної напруги, то амплітуди вказаних перешкод будуть знижені
компенсаційними стабілізаторами в Кк (Кк
– коефіцієнт зниження амплітуди К-ї перешкоди в вихідній напрузі
джерела живлення).З деякою ідеалізацією схема заміщення джерела живлення
електронної схеми приводиться на рис.1.21,де rf, Cf – параметри вихідного фільтра.
uп1(t)- детермінований ряд гар-монік джерела живлення; Еg ,
rg - параметри джерела живлення;uп2(t) =![]() unk(t).
unk(t).
Гармоніки вихідної напруги джерела як відомо, за допомогою зворотніх зв’язків компенсаційного стабілізатора в багатьох випадках не знижуються і для їх зменшення до допустимих параметрів використовуються пасивні фільтри.
Звернемось тепер до причин появи внутрішних перешкод. Як вище відмічалось, основна причина їх наявності це невідповідність елементів та вузлів електронних схем, які використовуються при проектуванні , їх реальним характеристикам. Тому можна сказати, що причинами появи внутрішніх перешкод являються:
· неідеальність активних і реактивних компонентів схеми, що проявляється на високих частотах;
· наявність внутрішнього опору джерел живлення, що приводить до коливань вихідної напруги при зміні величини навантаження;
· наявність опору шин живлення що приводить до падіння напруги на них і може сприйматись окремими елементами як інформаційний сигнал;
· наявність ємкісних зв’зязків між шинами живлення та інформаційними входами;
Відмічена наявність невраховуємих при приектуванні активних та реактивних складових поєднується з слідуючою специфікою цифрових схем:
· значні струми живлення, що досягають десятків ампер при низьких робочих напругах ключових елементів( сучасні процесори при напрузі живлення 1.6В споживають струм до 15А);
· значною динамікою навантаження цифрових схем та пристроїв, яке обумовлене як швидкою зміною підключення та відключення окремих вузлів та блоків cхеми, так і значними імпульсними струмами, які споживаються окремими ключами з врахуванням їх синхронної роботи.
Перша специфіка цифрових схем приводить до того, що потенціал загальної шини на різних ділянках відрізняється на величину падіння напруги DU3 між ними, яка пропорціональна величині струму та опору загальної шини. Якщо структура шин побудована без врахування цієї специфіки, то величина ΔU3 може досягати сотень мілівольт.
 Друга
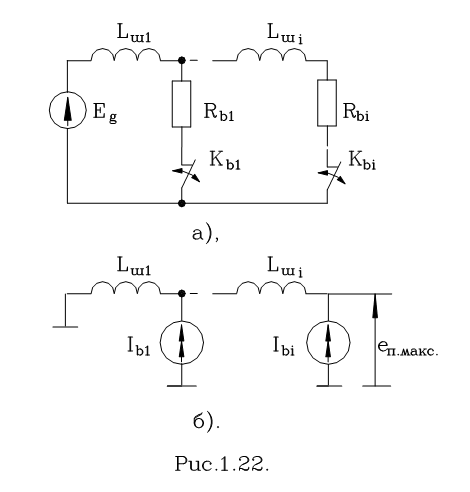
специфіка про-являється через наявні індуктивні опори шин живлення. На рис.
1.22.а проводиться еквівалентна схема живлення цифрових схем з окремими
вузлами, які представлені еквівалентними опорами RbІ та ключами КbІ. Підключення - відключення окремих вузлів еквівалентно появі
імпульсних струмів Ibi, які призводять до появи дінамічних перешкод епi, визначаємих індукивностями
ділянок шини
Друга
специфіка про-являється через наявні індуктивні опори шин живлення. На рис.
1.22.а проводиться еквівалентна схема живлення цифрових схем з окремими
вузлами, які представлені еквівалентними опорами RbІ та ключами КbІ. Підключення - відключення окремих вузлів еквівалентно появі
імпульсних струмів Ibi, які призводять до появи дінамічних перешкод епi, визначаємих індукивностями
ділянок шини
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.