 Иногда уравнение звена записывается в виде:
Иногда уравнение звена записывается в виде: ![]() , где
, где ![]() -
приведенная скорость звена. Коэффициент
-
приведенная скорость звена. Коэффициент ![]() равен
скорости изменения выхода при подаче единичного скачкообразного возмущения на
вход.
равен
скорости изменения выхода при подаче единичного скачкообразного возмущения на
вход.
![]() =
= .
.
Передаточная функция: ![]() .
.
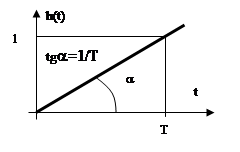
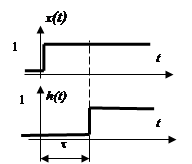
Переходная характеристика. 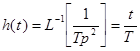 .
.
Постоянная времени интегрирования представляет собой промежуток времени, за который выход звена достигнет 1, при подаче единичного скачкообразного возмущения на вход.
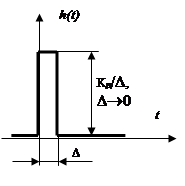
Импульсная характеристика:
![]() .
.
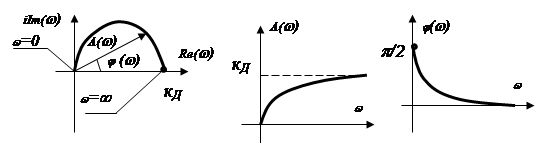
АФХ: ![]() .
.
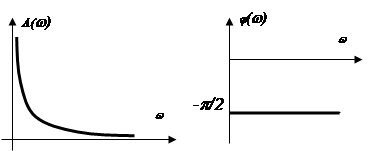
АЧХ: ![]() .
.
ФЧХ: ![]() .
.
|
Идеальное дифференцирующее звено
 Идеальным дифференцирующим звеном называется такое
звено, свойства которого описываются уравнением:
Идеальным дифференцирующим звеном называется такое
звено, свойства которого описываются уравнением:
![]()
![]()
Передаточная функция: ![]() .
.
Переходная характеристика. 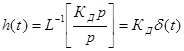 .
.
Импульсная характеристика:
![]() .
.
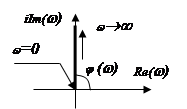
АФХ: ![]() .
.
АЧХ: ![]() .
.
ФЧХ: ![]() .
.
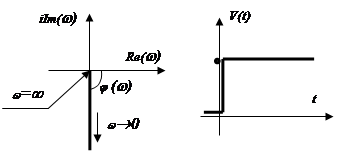
Вывод. Илеальное дифференцирующее звено является идеальной моделью, что
на прктике возможно лишь на на некоторой степени приближения. Отметим, что ?????????
на выходе звена будет опережать по фазе входной сигнал на ![]() рад.
рад.
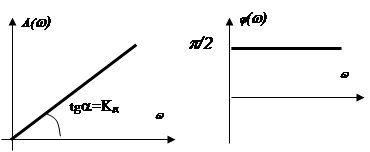
Реальное дифференцирующее звено
 Реальным дифференцирующим звеном называется такое
звено, динамика которых описывается дифференциальным уравнением:
Реальным дифференцирующим звеном называется такое
звено, динамика которых описывается дифференциальным уравнением:
![]()
![]() , где
, где ![]() -
коэффициент передачи реального дифференцирующего звена,
-
коэффициент передачи реального дифференцирующего звена, ![]() -
постоянная времени.
-
постоянная времени.
Передаточная функция: ![]() .
.
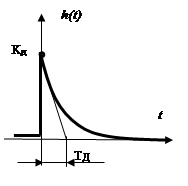
Переходная характеристика.  .
.
 Найдем переходную характеристику, решив
дифференциальное уравнение звена. Его решение будет иметь вид:
Найдем переходную характеристику, решив
дифференциальное уравнение звена. Его решение будет иметь вид: ![]() , учитывая, что
, учитывая, что ![]() ,
найдем постоянную С из свойств переходной характеристики:
,
найдем постоянную С из свойств переходной характеристики:
![]() , тогда
, тогда ![]()
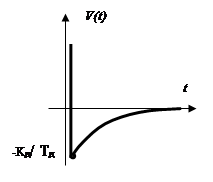
Импульсная характеристика:
 .
.
АФХ:  .
.
АЧХ: 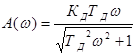 .
.
ФЧХ: ![]() .
.
Вывод. Выходной сигнал опережает по фазе
входной гармонический сигнал. Переходная характеристика ![]() ,
т.е. возвращается на первоначальный ее уровень до нанесения возмущения
,
т.е. возвращается на первоначальный ее уровень до нанесения возмущения
Звено запаздывания
Звеном запаздывания называется такое звено, свойства которого описывается уравнением:
![]()
![]() , где
, где ![]() -
величина запаздывания, [с]. Всегда
-
величина запаздывания, [с]. Всегда ![]() >0.
>0.
Передаточная функция: ![]() .
.
Переходная характеристика. 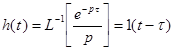 .
.
Импульсная характеристика:
![]() .
.
АФХ: ![]() .
.
АЧХ: ![]() .
.
ФЧХ: ![]() .
.
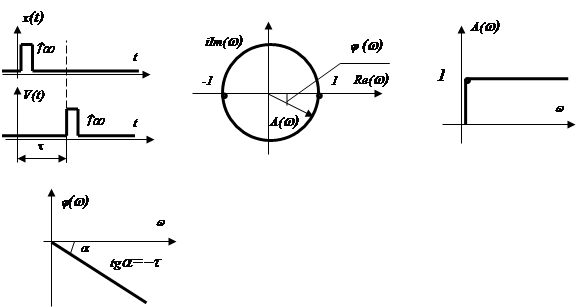
Вывод. Гармонический сигнал при прохождении через звено запаздывания не искажается по амплитуде, а сдвиг по фазе идет в сторону отставания.
Устойчивость систем управления.
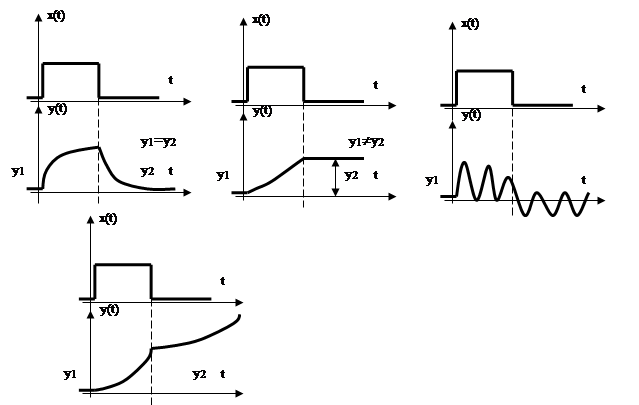
Устойчивой называется такая система, в
которой при нанесении возмущения ![]() и прекращения его
действия выходная величина системы в установившемся режиме будет равна ее
значению до нанесения возмущения.
и прекращения его
действия выходная величина системы в установившемся режиме будет равна ее
значению до нанесения возмущения.
Нейтрально устойчивой называется такая система, в которой при нанесении возмущения и прекращении его действия выходная величина системы в установившемся режиме будет отличаться от ее значения до нанесения возмущения.
Системой на границе устойчивости называется такая система, в которой при нанесении возмущения и прекращении его действия выходная величина системы совершает гармонические колебания.
Неустойчивой называется такая система, в которой при нанесении возмущения и прекращении его действия выходная величина системы будет неограниченно возрастать.
 Реальные АСР должны быть устойчивыми. Учитывая тот
факт, что реальные АСР практически всегда являются нелинейными в отличие от из
линеаризованных моделей, необходимо выяснить связь между устойчивостью реальной
нелинейной АСР и ее линеаризованной моделью.
Реальные АСР должны быть устойчивыми. Учитывая тот
факт, что реальные АСР практически всегда являются нелинейными в отличие от из
линеаризованных моделей, необходимо выяснить связь между устойчивостью реальной
нелинейной АСР и ее линеаризованной моделью.
Первая теорема Ляпунова.
Если все корни
характеристического уравнения линеаризованной системы являются отрицательными: ![]() , то реальная нелинейная система будет
устойчивой, т.е. если линейная модель системы будет устойчива, то добавлением
отброшенных членов ряда Тейлора ее невозможно превратить в неустойчивую.
, то реальная нелинейная система будет
устойчивой, т.е. если линейная модель системы будет устойчива, то добавлением
отброшенных членов ряда Тейлора ее невозможно превратить в неустойчивую.
Вторая теорема Ляпунова.
Если хотя бы один
корень характеристического уравнения линеаризованной системы ![]() , то реальная нелинейная система будет
неустойчивой, т.е. если линейная модель системы будет неустойчива, то
добавлением отброшенных членов ряда Тейлора ее невозможно превратить в
устойчивую.
, то реальная нелинейная система будет
неустойчивой, т.е. если линейная модель системы будет неустойчива, то
добавлением отброшенных членов ряда Тейлора ее невозможно превратить в
устойчивую.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.