где ![]() - вектор переменных состояния;
- вектор переменных состояния; ![]() - вектор управляющих воздействий; А
и В – матрицы коэффициентов.
- вектор управляющих воздействий; А
и В – матрицы коэффициентов.
 ,
,  ,
,
 ,
,  ,
,
 .
.
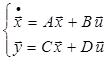
Уравнение (2)
описывает только лишь динамику системы. Для того, чтобы получить значение
выходных параметров системы необходимо найти значение вектора выходов ![]() . В матричной форме записи:
. В матричной форме записи:
![]() , где C
и D - матрицы,
, где C
и D - матрицы, ![]() . Таким образом в пространстве
состояний описание системы имеет вид:
. Таким образом в пространстве
состояний описание системы имеет вид:
Рассмотрим пример перехода от описания системы линейных дифференциальных уравнений к описанию системы в пространстве состояний.
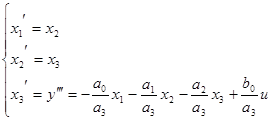
Пусть система описывается
дифференциальным уравнением: ![]() . Обозначим
переменные состояния:
. Обозначим
переменные состояния: ![]() ,
, ![]() ,
, ![]() . Тогда :
. Тогда :
 или
или 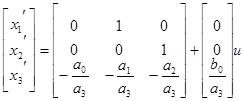
Так как система имеет один выход, то уравнение (3) будет иметь вид:
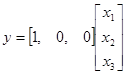 .
.
Достоинства описания систем в пространстве состояний:
1. Универсальное описание различных систем.
2. Возможность универсального решения задач многомерными системами, содержащими несколько входов и выходов.
Недостатки:
1. Недостаточная наглядность описания.
2. Проблемы вычислительного характера.
Преобразование Лапласса.
В ТАУ широко
применяются методы операционного исчисления, в основе которых лежит
преобразование Лапласса. Оно преобразует функцию вещественной переменной ![]() в функцию комплексной переменной F(p)
по формуле:
в функцию комплексной переменной F(p)
по формуле: ![]() . Функция f(t) называется оригиналом, F(p) – изображением
по Лаплассу. Обозначают:
. Функция f(t) называется оригиналом, F(p) – изображением
по Лаплассу. Обозначают:
![]() и
и ![]() ,
где L – орератор Лапласса.
,
где L – орератор Лапласса.
Применение преобразования Лапласса облегчает решение дифференциального уравнения динамики, так как при этом дифференциальные уравнения заменяются алгебраическими уравнениями относительно р.
Основные свойства преобразования Лапласса:
1. Свойство линейности.
![]() .
.
Пример.
![]() . Тогда
. Тогда ![]() ,
где Y(p) – изображение функции
y(t),
,
где Y(p) – изображение функции
y(t), ![]() - изображения функциий
- изображения функциий ![]() .
.
2. Дифференцирование оригинала.
![]() .
.
Пример.
![]() .
.
Преобразуя по
Лаплассу, получим: ![]() .
.
3. Интегрирование орогинала.
![]() .
.
Пример.
![]() , тогда
, тогда ![]() .
.
4. Теорема запаздывания.
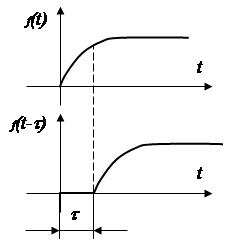
![]() , где t - положительное число.
, где t - положительное число.
Проиллюстрируем
функцию запаздывания графически. При ![]() функция
функция ![]() .
.
Пример.
![]() , тогда
, тогда ![]() .
.
Пример.
![]() , тогда
, тогда ![]() .
.
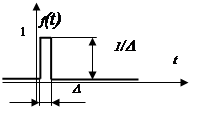
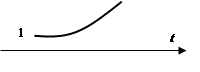
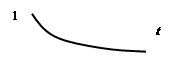
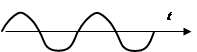
Таблица оригиналов и изображений
|
№ |
Оригинал f(t) |
График f(t) |
Изображение |
|||||||
|
1 |
|
|
|
|||||||
|
2 |
|
|
|
|||||||
|
3 |
|
|
|
|||||||
|
4 |
|
|
|
|||||||
|
5 |
|
|
|
|||||||
|
6 |
|
|
|
|||||||
|
7 |
|
|
|
|||||||
|
8 |
|
|
|
|||||||
|
9 |
|

|
|
|||||||
|
10 |
|
|
|
|||||||
|
11 |
|
|
|
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.
 , где
, где