Рассмотрим этот процесс на примере цепи АРУ, содержащей регуляторы релейного
типа с И- регулированием. Предположим, что скорость регулирования постоянна: ![]() Допустим также, что в момент времени t=0 уровень сигнала КЧ на входе 1-го регулятора уменьшился на Dр (рис. 4.55). Полагая, что зона
нечувствительности регулятора пренебрежимо мала по сравнению с Dр, находим время восстановления уровня на выходе
1-го регулятора (линия 1):
Допустим также, что в момент времени t=0 уровень сигнала КЧ на входе 1-го регулятора уменьшился на Dр (рис. 4.55). Полагая, что зона
нечувствительности регулятора пренебрежимо мала по сравнению с Dр, находим время восстановления уровня на выходе
1-го регулятора (линия 1):
![]()
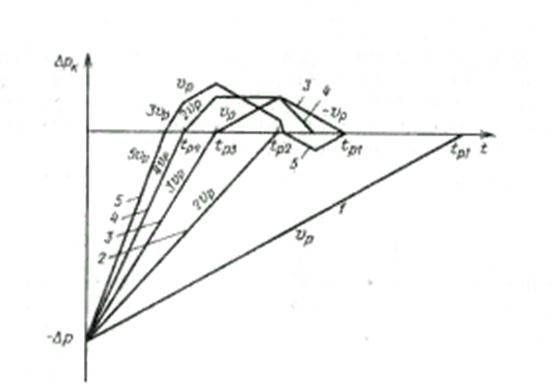
Рис. 4.55. Переходные процессы цепи АРУ, содержащей регуляторы релейного типа: 1-на выходе 1-го регулятора; 2-на выходе 2-го регулятора; 3-на выходе 3-го регулятора; и т.д.
На выходе 2-го регулятора скорость восстановления уровня будет равна 2vp, так как она определяется работой двух регуляторов (линия 2). Соответственно время восстановления будет вдвое меньшим:
![]()
Поскольку 1-го регулятор продолжает увеличивать уровень на входе 2-го, последний начнет обратное регулирование и уровень на его выходе останется равным номинальному. На выходе З-го регулятора время восстановления уровня контрольного сигнала
![]()
![]()
При достижении номинального значения на выходе 3-горегулятора уровень
сигнала КЧ будет продолжать увеличиваться со скоростью vр (линия 3), так как первые два регулятора
увеличивают его с суммарной скоростью 2vp, а третий - снижает со скоростью vp. В момент tp2 возрастание уровня сигнала КЧ на выходе З-го регулятора прекращается, и
он начнет снижаться, поскольку с этого момента два регулятора (2-й и 3-й)
осуществляют обратное регулирование, а один (1-й) - прямое. Уровень снижается
со скоростью vр и достигает номинального значения через
интервал времени ![]() . К этому моменту
приращение уровня сигнала КЧ на входе 3-го регулятора прекратится и регулятор
остановится.
. К этому моменту
приращение уровня сигнала КЧ на входе 3-го регулятора прекратится и регулятор
остановится.
Как видно из графиков, приведенных на рис. 4.55, на выходе З-го регулятора имеет место перерегулирование. Продолжая аналогичные рассуждения, можно определить характер переходного процесса на выходе 4-го и 5-го регуляторов. На выходе 5-го регулятора (линия 5) переходный процесс становится колебательным. Величина перерегулирования зависит от числа регуляторов в цепи АРУ, и, как показывают расчеты, при п®¥D рк вх≤ 0,4. Таким образом, в цепи АРУ с регуляторами, имеющими апериодическую переходную характеристику,
процесс восстановления уровня сигнала КЧ имеет существенно более сложный колебательный характер и сопровождается перерегулированием.
Анализ работы цепей АРУ с И-регулированием аналогового типа и П-регулированием показывает, что в первых характер переходного процесса близок к рассмотренному выше, а во вторых величина перерегулирования значительно больше (по крайней мере в 1,5...2 раза), чем у цепи АРУ с И-регулированием, и сильно зависит от числа одиночных устройств в цепи АРУ. Неудовлетворительный характер переходного процесса в цепях АРУ с П-регуляторами является одной из основных причин сравнительно редкого их использования в аппаратуре современных АСП.
Для улучшения динамических свойств цепей АРУ помимо использования более совершенных с точки зрения переходных характеристик одиночных устройств АРУ применяется ряд способов, многие из которых сводятся к уменьшению числа регуляторов цепи АРУ, работающих по одному и тому же сигналу КЧ, что дает весьма ощутимый эффект.
Одним из способов уменьшения числа регуляторов в цепи АРУ является переприем по КЧ, суть которого показана на рис. 4.56. На одной из усилительных станций устанавливается режекторный фильтр (РФ), не пропускающий контрольный сигнал, а после него включают второй генератор КЧ (ГКЧ), вырабатывающий сигнал с такой же частотой. Цепь АРУ оказывается разделенной на две, и число устройств АРУ в цепи уменьшается вдвое, что улучшает динамические свойства системы АРУ в целом.
Данный способ приводит к усложнению аппаратуры и увеличению ее объема, поэтому переприем по КЧ обычно сочетают с переприемом по информационным сигналам, который оказывается необходимым с точки зрения организации связи. Для каждой системы передачи определяется максимальное расстояние между переприемными пунктами. Тем самым ограничивается число устройств в цепи АРУ.
Другим способом уменьшения регуляторов в цепи АРУ является, как уже указывалось, сочетание устройств АРУ по КЧ с косвенными устройствами АРУ^ например АРУ по температуре грунта. Устройства
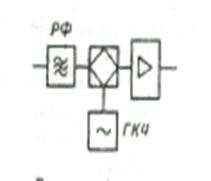
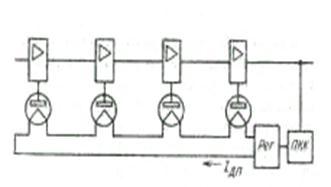
Рис. 4.56. Перепри- Рис. АРУ по току дистанционного питания
ем по контрольной
АРУ по температуре грунта устанавливаются на большей части усилительных станций в тракте передачи и работают независимо друг от друга, не ухудшая динамические свойства цепи АРУ. Число устройств АРУ по КЧ при этом значительно уменьшается.
Динамику работы цепи АРУ можно улучшить, используя устройства с разными скоростями регулирования. Например, если через несколько медленно действующих устройств включить быстродействующее, то оно будет компенсировать изменения сигнала КЧ, происходящие не только на прилегающем к нему участке линии, но и возникающие из-за переходных процессов в предыдущих медленно действующих. При этом способе, однако, устраняется перерегулирование только на выходе цепи АРУ, а на выходах отдельных устройств оно остается. Поэтому данный способ широкого применения не нашел.
Весьма эффективным оказался способ, при котором цепи управления разных регулируемых объектов объединяются в одну и управляются одним регулятором и одним ПКК (рис. 4.57). В цепи АРУ на выходе одного из устройств АРУ включен ПКК, который через схему сравнения и электронный регулятор изменяет ток дистанционного питания (ДП), протекающий через подогреватели терморезисторов ПАК не только данной, но и нескольких предыдущих станций. Такой тип АРУ называют АРУ по току ДП. Поскольку все
одиночные устройства АРУ имеют общую цепь управления, они работают как устройство АРУ с одной петлей регулирования и имеют динамические параметры одиночного устройства. Погрешность АРУ по ДП больше, чем АРУ по КЧ, но значительно меньше погрешности температурной АРУ.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.