Недостатком рассмотренной схемы является нарушение состояния двоичного счетчика при кратковременных пропаданиях напряжения питания и повторной его подаче. Это объясняется тем, что триггерные ячейки, входящих в состав счетчика, имеют неизбежную асимметрию и при отключении питания оказываются ориентированными произвольно. Для того чтобы при повторной подаче питания усиление регулируемого усилителя не оказалось максимальным, счетчик в этом случае принудительно "обнуляется", что, как указывалось, соответствует минимальному усилению.
В дискретных регуляторах могут, как отмечалось выше, использоваться магнитные элементы памяти - трансфлюксоры.
Трансфлюксор - дискообразный ферритовый сердечник с прямоугольной петлей гистерезиса, имеющий два отверстия с разными диаметрами (рис. 4.53). Наименьшие площади сечения, показанные на рис. 4.53, удовлетворяют условию S1=2S2=2S3. Трансфлюксор имеет одну обмотку управления wупр и две рабочие обмотки wр1 и wр2. Перемагничивание сердечника из одного состояния насыщения в другое происходит при напряженностях поля, равных ±Нс. Предположим, что начальное магнитное состояние сердечника соответствует рис. 4.54, а, где стрелками показаны направления остаточной индукции. При подаче в обмотку wупр тока Iупр, создающего магнитное поле противоположного направления, осуществляется перемагничивание сердечника слоями, ограниченными линиями li, (рис. 4.54, 6), которые определяются из условия Iупр=Hсli/ wупр. При токе управления Iупр=Hсl2/ wупр будет перемагничен участок магнитопровода трансфлюксора, ограниченный линией l2 на рис. 4.54, в. Полное перемагничивание всего сердечника происходит при токе управления Iупр=Hсl3/ wупр (рис.4.54,г).
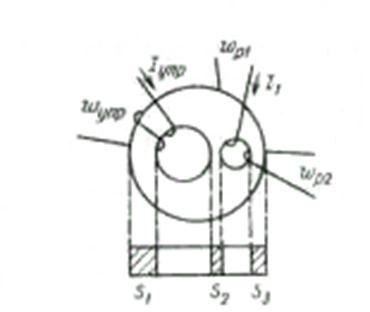 Рис. 4.53. Регулятор на трансфлюксоре
Рис. 4.53. Регулятор на трансфлюксоре
Если в обмотку wр1 подать переменный ток I1, с амплитудой Нсl4/ wр1<I1m<Hcl5/ wр1, то этот ток в пределах участков магнитопровода, ограниченных кривой l4, создает магнитное поле, напряженность которого превысит Нс и которое может перемагнитить участки с сечениями S2 и S3, если Нсl1/ wупр<Iупр<Hcl3/ wупр.
Полагая, что в положительный полупериод переменный ток создает магнитный поток, направленный по часовой стрелке, можно заключить, что в этот полупериод направление магнитных потоков на участках с сечениями S2 и S3 изменится на противоположное. В обмотке wр2 в данном случае будет наводиться ЭДС, среднее значение которой зависит от степени насыщения указанных участков магнитопровода, т.е. от тока Iупр Максимум ЭДС будет иметь место при наибольшая часть I упр= Нсl2/wупр, так как наибольшая часть магнитного потока меняет свое направление под воздействием тока I1.
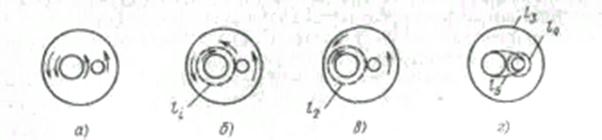
Рис. 4.54. К объяснению работы регулятора на трансфлюксоре
Обмотка wр2 соединена с цепью подогрева терморезистора, и при изменении наводимой в ней ЭДС ток подогрева и сопротивление рабочего тела терморезистора изменятся.
В качестве управляющего сигнала обычно применяют короткие импульсы с большой скважностью. В результате действия каждого управляющего импульса магнитный поток в сердечнике изменяется на величину АФ^ а общая величина его изменения определяется суммарным действием всех импульсов. Таким образом, трансфлюксор является интегрирующим звеном. Процесс изменения сигнала на его выходе аналогичен изменению сигнала на выходе электронного регулятора. При отключении датчика импульсов управления трансфлюксор сохраняет то состояние, в котором он находился в момент отключения, т. е. обладает памятью.
В реальном устройстве АРУ с трансфлюксором число степеней регулирования составляет 150...200, что обеспечивает практически плавное регулирование усиления.
Динамика работы цепи последовательно включенных устройств
АРУ
В линейных трактах СП устройства АРУ по КЧ включаются, как правило, на всех обслуживаемых усилительных станциях, а при большом числе НУП между ОУП АРУ устанавливаются и на некоторых НУП. В результате тракт может содержать десятки и даже сотни устройств АРУ, работающих по одному сигналу КЧ , который вырабатывается на оконечной станции передачи. Такие устройства образуют цепь АРУ- статические и динамические параметры которой могут существенно отличаться от соответствующих параметров одиночных устройств АРУ того же типа. Рассмотрим наиболее важные параметры процесса регулирования в цепи АРУ - статическую погрешность регулирования и величину перерегулирования.
Статическая погрешность регулирования, как указывалось, принципиально свойственна только системам с П- регулированием. Для одиночного устройства АРУ она в соответствии с (4.67) имеет вид
![]()
В дальнейшем для краткости будем называть одиночные устройства АРУ по КЧ регуляторами, а участок тракта между двумя соседними регуляторами - секцией АРУ. Предположим, что изменения уровня сигнала КЧ вызваны температурными изменениями затухания линии и происходят одновременно на всех секциях АРУ. Если в цепи АРУ, содержащей п однотипных регуляторов, уровень сигнала КЧ на входе первого регулятора изменился на Dрквх, то статическая погрешность регулирования на выходе 1-го регулятора Dрквх1=Dрквх/(1+Кп). Изменение уровня КЧ на входе 2-го регулятора
![]()
а статическая
погрешность регулирования на выходе этого регулятора![]() Аналогично на выходе n-го регулятора
Аналогично на выходе n-го регулятора

При п>> 1 и Кп> 1 статическая погрешность регулирования на выходе цепи АРУ практически не отличается от погрешности одиночного регулятора.
В устройствах АРУ с И- и ПИ-регулированием статическая погрешность регулирования определяется зоной нечувствительности, которая не зависит от величины Dрквх. При любом числе п она также не превышает погрешности одиночного регулятора.
При рассмотрении переходных процессов в цепи АРУ следует иметь в виду, что отклонение уровня сигнала КЧ на входе цепи воздействует на все регуляторы цепи практически одновременно, поскольку вследствие инерционности устройства АРУ не успевают за время распространения сигнала КЧ изменить свое состояние. В конце процесса регулирования уровни сигналов КЧ на выходе каждого регулятора оказываются номинальными, однако протекание процесса определяется не только характером изменения уровня в данном регуляторе, но и процессами, происходящими в других регуляторах цепи. Таким образом, имеет место взаимодействие регуляторов.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.