Интегрирующим элементом электромеханического регулятора является асинхронный двигатель с замедляющим регулятором, через который вращение ротора двигателя передается на РЭ. В качестве последнего может использоваться резистивный потенциометр или конденсатор переменной емкости (рис. 4.48). Асинхронный двигатель содержит три статерных обмотки: одну мотку возбуждения (II) и две - управления (I). Через обмотку возбуждения от генератора с частотой 400 Гц (Г-400) непрерывно протекает ток, сдвинутый по фазе относительно токов, протекающих через обмотки управления, на 90°. Токи в обмотках управления включаются контактами дифференциального или магнитоэлектрического реле (РМЭ). Принцип действия РМЭ основан на вращении рамки с током в поле постоянного магнита. Чем больше выпрямленный ток КЧ, протекающий через рамку, тем больше угол поворота рамки, на которой укреплен подвижной контакт 1 РМЭ. При номинальном уровне тока КЧ подвижный контакт находится между двумя неподвижными контактами 2 и 3. При увеличении тока КЧ относительно номинального значения контакты 1 и 3 замыкаются. При уменьшении тока КЧ рамка вращается в противоположную сторону под действием спиральной пружины, сила упругости которой является эталоном. При этом замыкаются контакты 1 и 2. Контакты реле замыкается при изменении уровня тока КЧ относительно номинальном значения на ±0,5 дБ. Эта величина определяет зону нечувствительности регулятора. При замыкании контактов 1 и 3 (1 и 2) на одну из обмоток управления подается ток от того же генератора Г-400. Совместное действие обмоток возбуждения и управления приводит к вращению ротора двигателя. Направление вращения зависит от того, какая из обмоток управления подключится к Г-400. Это, в свою очередь, зависит от знака отключения уровня сигнала Кч. Замедляющий редуктор обеспечивает увеличение постоянной времени tиз ИЗ.
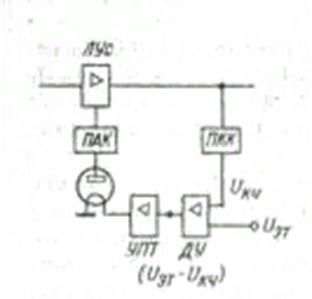
Рис. 4.47. Структурная схема устройства АРУ электротермическим регулятором
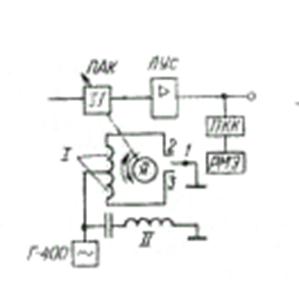
Рис4.48. Структурная схема устройства электромеханическим регулятором
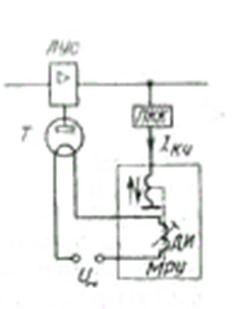
Рис. 4.49. Регулятор с магнитоэлектрическим устройством
Блокировка АРУ осуществляется отключением генератора Г-400 от обмотки возбуждения вращения двигателя. При вращении ротора двигателя переменный конденсатор или резистивный потециометр изменяют затухание ПАК,а следовательно, и усиление Лус. После восстановления номинального значения уровня сигнала КЧ на выходе ЛУс подвижной контакт РМЭ перемещается в нейтральное положение, ток в обмотке управления исчезает и двигатель останавливается.
Пространственное положение ротора двигателя при номинальном уровне сигнала КЧ может быть самым разным и зависит от изменения уровня не только в данный момент, но и во все предшествующие моменты, что характерно для интегрирующих элементов.
Рассмотренное устройство АРУ является устройством релейного типа, переходные характеристики которого представляют собой не экспоненту, а отрезок прямой, что создает наиболее благоприятный характер переходного процесса. Электромеханические регуляторы обеспечивают сравнительно большие пределы регулирования усиления, однако они громоздки, имеют недостаточную надежность, потребляют большую мощность от источника питания и по этим причинам в современных СП используются редко.
Развитием электромеханических устройств АРУ является термоэлектромеханическая АРУ, в которой регулируемым элементом ПАК служит терморезистор косвенного подогрева. Изменение тока подогрева осуществляется реостатом, подвижной контакт которого жестко связан с осью ротора двигателя. Кратковременные потери контакта реостата, возможные из-за его изнашивания, не сказываются на сопротивлении терморезистора вследствие тепловой инерции последнего.
Существенно лучшие показатели имеет регулятор с магнитоэлектрическим устройством (МРУ) (рис. 4.49). В составМРУ входит магнитоэлектрический двигатель, состоящий из магнитной системы и подвижной катушки, которая под действием тока, протекающего через обмотку катушки и взаимодействующего с полем постоянного магнита, может совершать вертикальное возвратно-поступательное движение. При номинальном уровне тока КЧ подвижная катушка находится в среднем положении. При этом масса подвижной части МРУ^ которая выполняет роль эталона, уравновешивается силой, создаваемой взаимодействием тока в подвижной катушке и полем магнитной системы. При поклонении тока КЧ от номинального значения равновесие нарушается, и катушка двигателя начинает перемещаться вверх или вниз в зависимости от знака отклонения тока КЧ.
Внутренний объем МРУ заполнен вязкой жидкостью, которая обеспечивает увеличение постоянной времени интегрирующего устройства, создавая жидкостное трение при перемещении подвижной катушки. С катушкой двигателя жестко связан шток, перемещающий магнитный элемент в зазоре магнитопровода датчика индуктивности (ДИ) и изменяющий индуктивное сопротивление последнего. Обмотка ДИ и нить подогрева терморезистора (Т) включены последовательно в цепь источника переменного тока U_. Изменение индуктивного сопротивления ДИ приводит к изменению тока подогрева и сопротивления тсрморезистора, который является регулируемым элементом ПАК.
Для обеспечения блокировки АРУ МРУ содержит электромагнитный фиксатор, удерживающий подвижную катушку двигателя в том положении, которое она занимала в момент пропадания или резкого уменьшения сигнала КЧ. Положение подвижной катушки двигателя МРУ так же, как и ротора электромеханического двигателя, при номинальном уровне сигнала КЧ на выходе ЛУс неоднозначно и зависит от изменений тока КЧ, имевших место до рассматриваемого момента времени, т.е. МРУ является интегрирующим звеном.
Более высокой чувствительностью и надежностью обладает МРУ с емкостным датчиком. Отличие ею заключается в том, что подвижная система этою устройства осуществляет вращательное движение при протекании тока через обмотку подвижной системы. Ток в обмотке определяется разностью выпрямленного тока КЧ и эталонного тока от стабилизированного источника. При номинальном уровне сигнала КЧ на выходе ЛУс она равна нулю и подвижная система МРУ находится в покое. При отклонении уровня сигнала КЧ от номинального значения ток, протекающий через обмотку двигателя МРУ, создает вращающий момент, и подвижная система начинает медленно перемещаться в вязкой жидкости, заполняющей объем МРУ. Направление вращения зависит от знака отклонения уровня сигнала КЧ.
Уважаемый посетитель!
Чтобы распечатать файл, скачайте его (в формате Word).
Ссылка на скачивание - внизу страницы.